
AINOW(エーアイナウ)編集部です。製造業の自動化において、組立工程は最も複雑で人手に頼ってきた領域です。しかし、AIビジョンと力覚センサーの進化により、組立ロボットは従来困難とされた精密作業を自動化できるようになりました。本記事では、組立ロボットの基本から最新技術、導入効果までを徹底解説します。
この記事のサマリー
- 組立ロボットの種類(SCARA・垂直多関節・協働)と用途別の選び方を解説
- 電子機器・自動車部品の組立自動化における実践的なノウハウを紹介
- 導入コスト・ROI・最新AI技術動向まで網羅的に解説
組立ロボットとは?
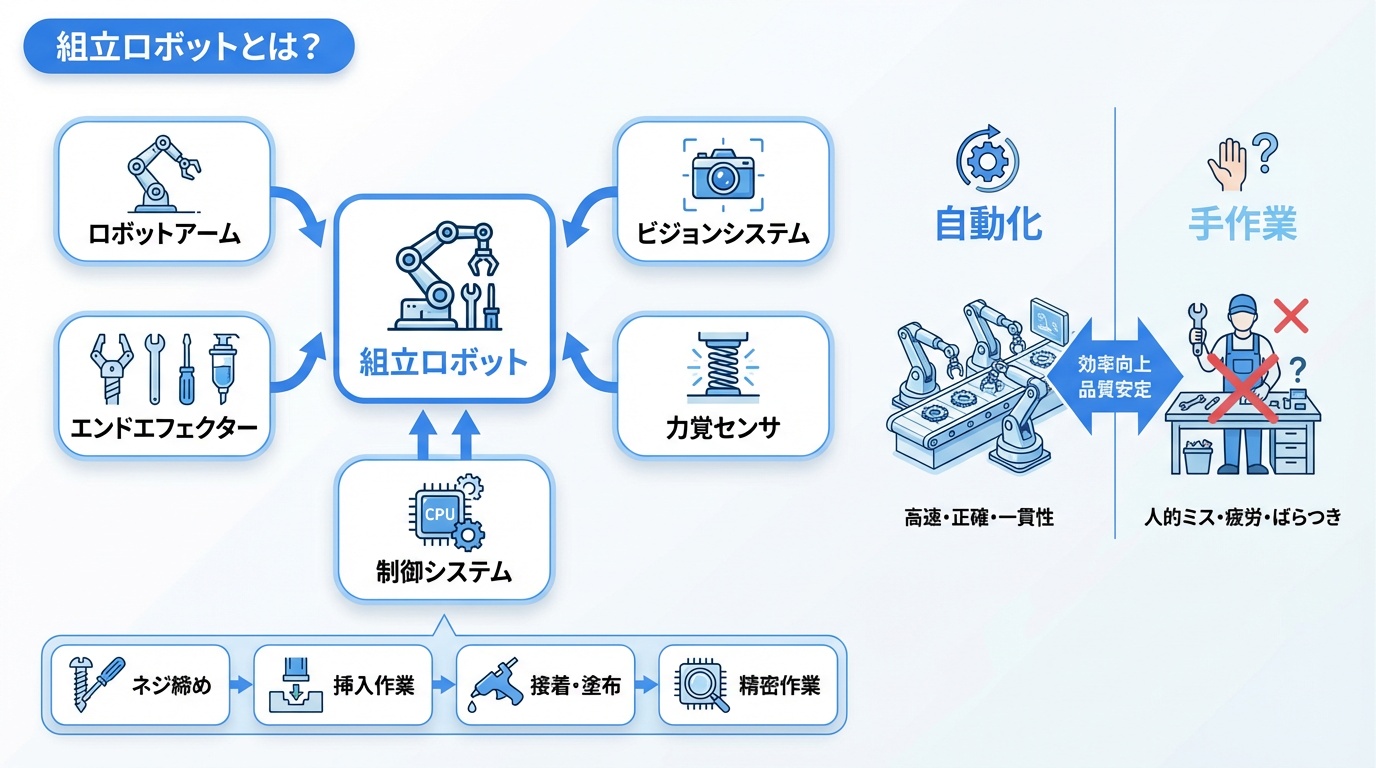
組立ロボット(Assembly Robot)は、部品同士を結合・接合して製品を完成させる産業用ロボットです。ネジ締め、部品挿入、はめ込み、接着、カシメなど、従来は人手で行っていた精密作業を自動化します。
組立ロボットの定義
組立ロボットは、以下の要素を組み合わせて複雑な組立作業を実行します。
- ロボットアーム:多軸の可動部で部品を操作
- エンドエフェクタ:ネジ締めドライバー、グリッパーなど作業別の先端ツール
- ビジョンシステム:カメラで部品位置・姿勢を認識
- 力覚センサー:接触力を検知し、精密な挿入作業を実現
- 制御システム:動作プログラムと各種センサーを統合制御
手作業との違い
組立ロボットと手作業の主な違いは以下の通りです。
| 項目 | 手作業 | 組立ロボット |
|---|---|---|
| 作業速度 | 個人差あり | 一定のサイクルタイム |
| 精度 | 熟練者で±0.5mm程度 | ±0.02mm以下も可能 |
| 稼働時間 | 8時間/日(交代制) | 24時間連続稼働可能 |
| 品質 | 疲労・体調で変動 | 常に一定 |
| 柔軟性 | 新作業に即座に対応 | プログラム変更が必要 |

AINOW編集部
|
組立ロボットの強みは「再現性」です。同じ動作を何万回繰り返しても品質が安定するため、量産品の組立に適しています。 |
組立作業の種類
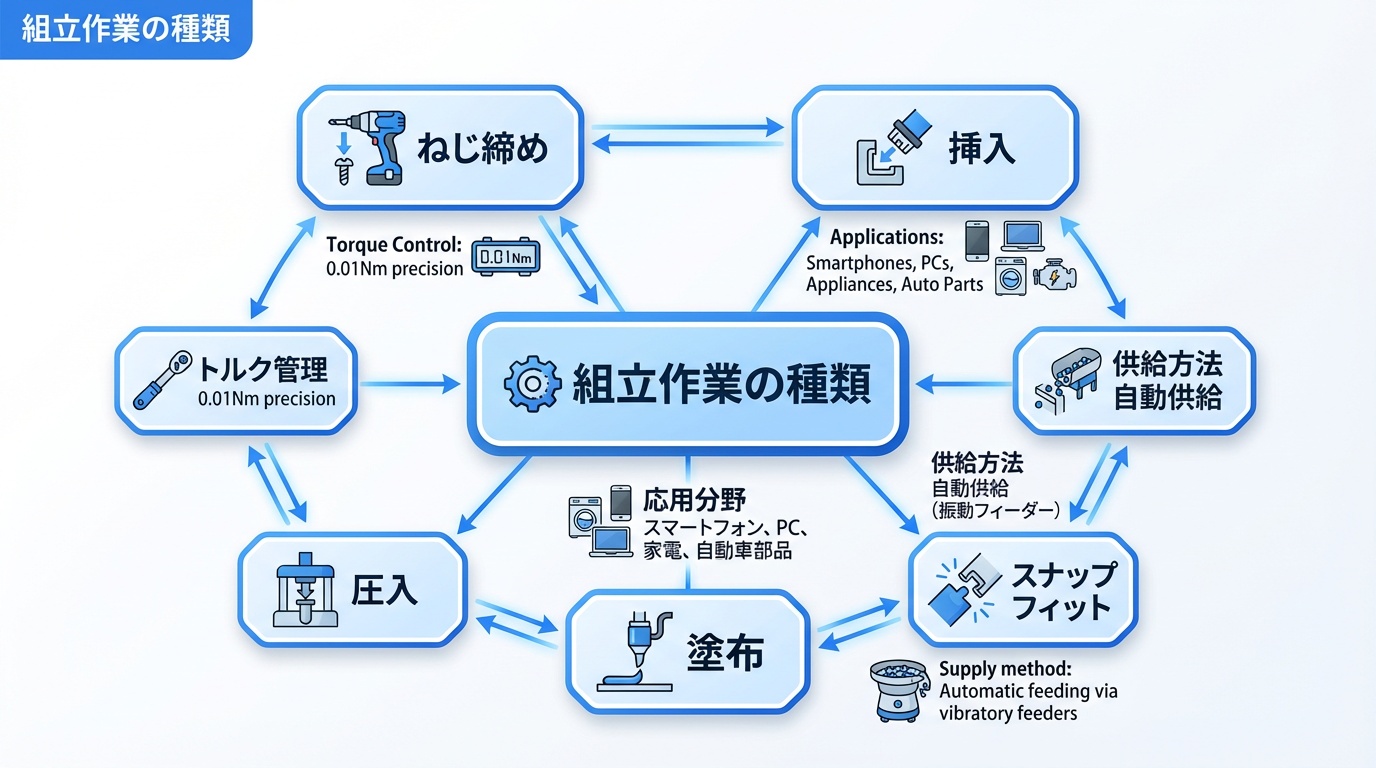
組立ロボットが行う主な作業タイプを解説します。
ネジ締め(スクリュードライビング)
最も一般的な組立作業です。自動供給されたネジを所定トルクで締め付けます。
- トルク管理:0.01Nm単位で締め付けトルクを制御
- ネジ供給:振動フィーダーやカセット式で自動供給
- 締め付け確認:トルク・角度で良否判定
- 適用製品:スマートフォン、PC、家電、自動車部品
挿入(インサーション)
部品を穴やスロットに挿入する作業。コネクタ挿入、ピン圧入などが該当します。
- Peg-in-Hole:ピンを穴に挿入する基本動作
- クリアランス:数十μmの隙間への挿入も対応
- 力制御:挿入抵抗を検知して姿勢を補正
- 適用例:コネクタ、ベアリング、シール部品
はめ込み(スナップフィット)
爪やフックで部品を固定する作業。接着剤やネジを使わない結合方式です。
- 押し込み力:爪がかかるまでの押し込み力を制御
- 確認動作:引っ張りテストで嵌合を確認
- 適用例:筐体組立、カバー取り付け、ケーブルクリップ
接着・塗布(ディスペンシング)
接着剤、シール材、グリスなどを塗布する作業です。
- 塗布パターン:点、線、面状に塗布
- 流量制御:ディスペンサーで塗布量を精密制御
- 適用例:ディスプレイ接着、防水シール、放熱グリス
カシメ・圧入(プレスフィット)
圧力を加えて部品を固定する作業です。
- 荷重管理:数kN〜数十kNの加圧力を制御
- ストローク監視:圧入量を0.01mm単位で管理
- 適用例:ベアリング圧入、端子カシメ、軸圧入
組立ロボットの構成
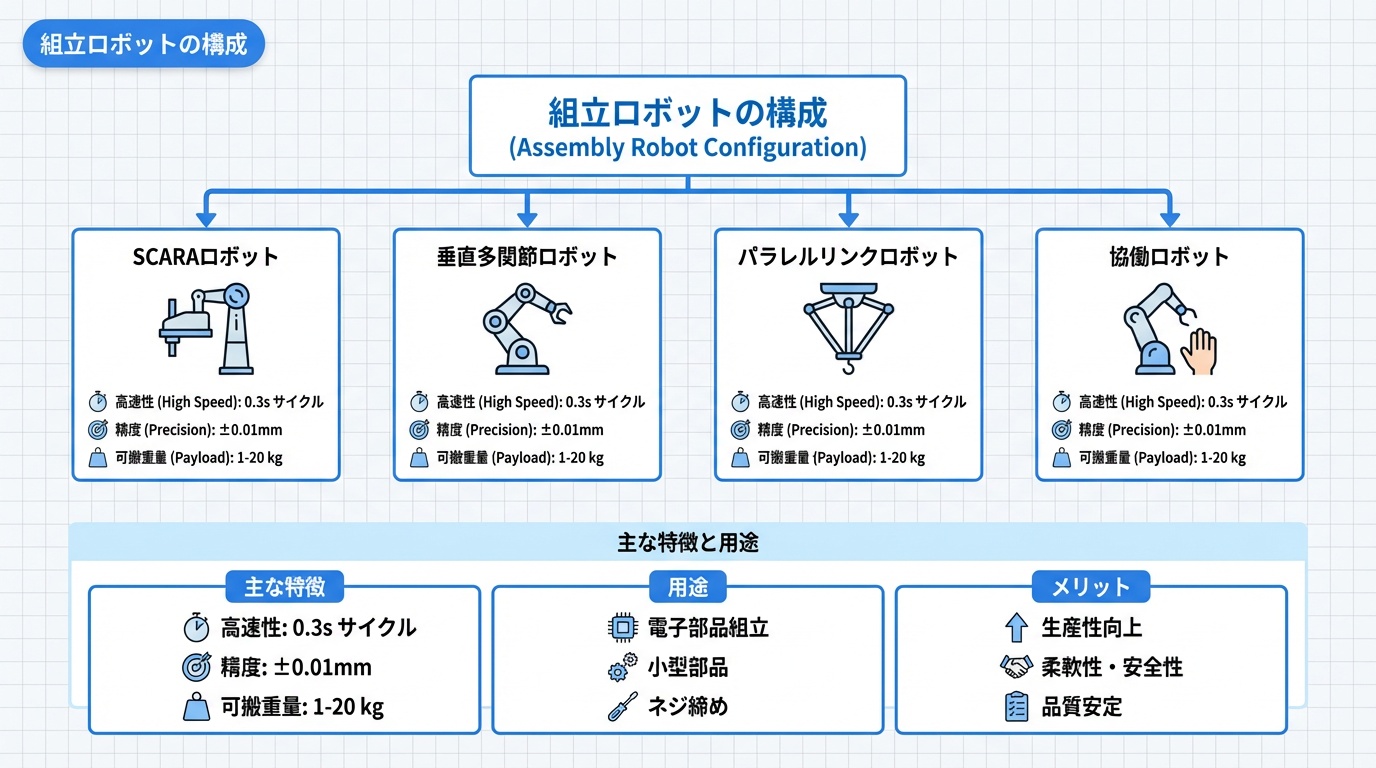
組立作業に使用される主なロボット形態を解説します。
SCARA(スカラ)ロボット
水平多関節型ロボット。高速で上下動作を伴う組立に最適です。
- 構造:水平面内で2軸回転、垂直方向に1軸
- 特徴:高速(サイクルタイム0.3秒〜)、高精度(±0.01mm)
- 可搬重量:1〜20kg
- 用途:電子部品実装後工程、小型部品組立、ネジ締め
- 代表メーカー:エプソン、ヤマハ、デンソーウェーブ
垂直多関節ロボット
6軸の自由度を持つ汎用性の高いロボットです。
- 構造:6軸の回転関節で人間の腕に近い動き
- 特徴:高い自由度、複雑な姿勢での作業が可能
- 可搬重量:3〜300kg以上
- 用途:自動車部品組立、大型製品組立、溶接
- 代表メーカー:ファナック、安川電機、ABB、KUKA
パラレルリンクロボット(デルタロボット)
軽量部品の超高速ピック&プレースに特化したロボットです。
- 構造:3〜4本のリンクで可動部を支持
- 特徴:超高速(150ピック/分以上)、軽量ワーク向け
- 可搬重量:0.5〜6kg
- 用途:食品、医薬品、小型電子部品の高速仕分け・組立
- 代表メーカー:ABB、ファナック、三菱電機
協働ロボット(コボット)
安全柵なしで人と並んで作業できるロボットです。
- 構造:トルクセンサー内蔵の6〜7軸多関節
- 特徴:衝突検知、低速・低出力で安全、直感的な教示
- 可搬重量:3〜35kg
- 用途:人との協調作業、多品種少量組立、柔軟なセル生産
- 代表メーカー:Universal Robots、ファナック、ABB
| ロボット形態 | 速度 | 精度 | 可搬重量 | 主な用途 |
|---|---|---|---|---|
| SCARA | 非常に高速 | ±0.01mm | 1〜20kg | 電子部品、小型組立 |
| 垂直多関節 | 中〜高速 | ±0.02〜0.1mm | 3〜300kg | 汎用、大型部品 |
| パラレルリンク | 超高速 | ±0.1mm | 0.5〜6kg | 軽量部品の高速作業 |
| 協働ロボット | 低〜中速 | ±0.03mm | 3〜35kg | 人協調、多品種少量 |
電子機器組立

電子機器の組立は、組立ロボットが最も活躍する分野です。
基板実装後工程
SMT(表面実装)後の後工程をロボットが担当します。
- コネクタ挿入:THT(スルーホール)部品の挿入
- ケーブル接続:FFC/FFPCの挿入、コネクタ嵌合
- 機構部品取付:ヒートシンク、シールド、スペーサー
- 検査工程:外観検査、導通検査との連携
スマートフォン組立
スマートフォンは組立ロボットの技術が凝縮された製品です。
- ディスプレイ貼り合わせ:数十μm精度での位置合わせ
- バッテリー挿入:柔軟物のハンドリング
- カメラモジュール:光学部品の精密組立
- 筐体組立:防水・防塵対応のシール処理
- サイクルタイム:1台あたり数十秒〜数分
コネクタ挿入の技術
コネクタ挿入は組立ロボットの難易度が高い作業の一つです。
- 位置決め精度:±0.05mm以内が必要
- 挿入力:数N〜数十Nを制御
- 傾き補正:ビジョンと力覚の組み合わせ
- 多芯コネクタ:100ピン以上の挿入も自動化
|
AINOW編集部
|
電子機器の組立では、クリーンルーム対応や静電気対策(ESD)が必須です。ロボット選定時には環境適合性も確認しましょう。 |
自動車部品組立
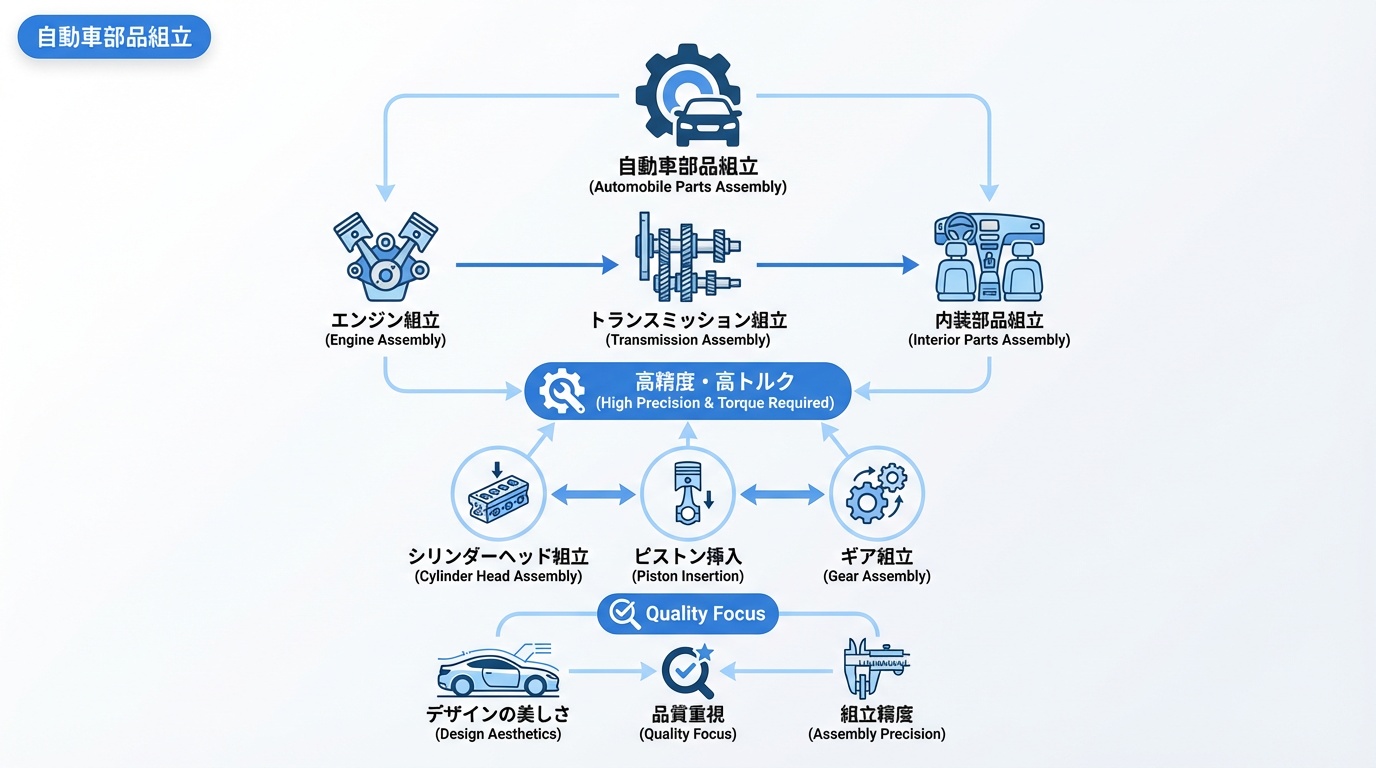
自動車産業は組立ロボットの最大のユーザーです。
エンジン・トランスミッション
パワートレイン組立は高精度・高トルクが求められます。
- シリンダーヘッド組立:バルブ、スプリング、シールの自動組付け
- ボルト締め:ヘッドボルトの段階トルク締め
- ピストン挿入:クリアランス管理とリング圧縮
- ギア組立:ベアリング圧入、シム調整
内装部品組立
内装部品は意匠面の品質と組立精度の両立が必要です。
- インストルメントパネル:大型部品の位置決めと固定
- ドアトリム:クリップ挿入、スピーカー取付
- シート組立:フレーム、レール、カバーの組付け
- 配線取付:ワイヤーハーネスのルーティング
EV電池パック組立
EV(電気自動車)の普及に伴い、電池パック組立の自動化が加速しています。
- セルスタッキング:数十〜数百個のセルを積層
- バスバー取付:電極間の接続
- BMS(電池管理システム)取付:センサー、基板の組付け
- シーリング:防水・絶縁処理
- 安全対策:高電圧対応、絶縁工具、漏電監視
精密組立技術
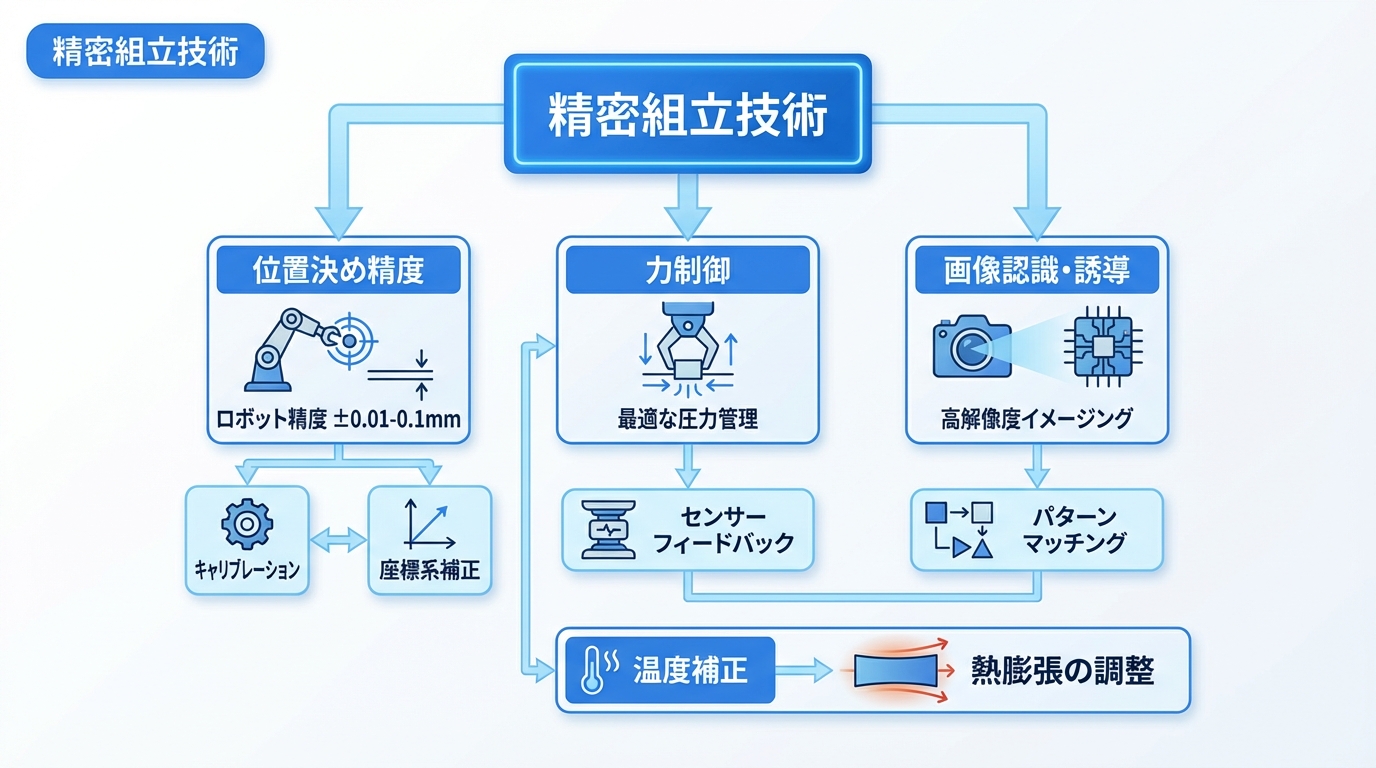
高精度な組立を実現するための技術要素を解説します。
位置決め精度
組立精度を決める最重要要素です。
- ロボット精度:繰り返し位置決め精度±0.01〜0.1mm
- 治具精度:ワーク固定治具の位置決め精度
- キャリブレーション:座標系の校正と補正
- 温度補償:熱膨張による位置ずれの補正
力制御(フォースコントロール)
接触を伴う作業に不可欠な技術です。
- 力覚センサー:6軸力覚センサーで接触力を検出
- インピーダンス制御:ばね・ダンパー特性を模擬
- ハイブリッド制御:位置制御と力制御の組み合わせ
- 応用例:挿入作業、研磨・バリ取り、嵌合確認
ビジョンガイダンス
カメラで部品位置を認識し、ロボット動作を補正します。
- 2Dビジョン:平面内の位置・角度認識
- 3Dビジョン:ステレオカメラ、構造化光、ToFセンサー
- ビンピッキング:バラ積み部品の認識と取り出し
- AI認識:ディープラーニングによる部品識別
|
フレキシブル生産
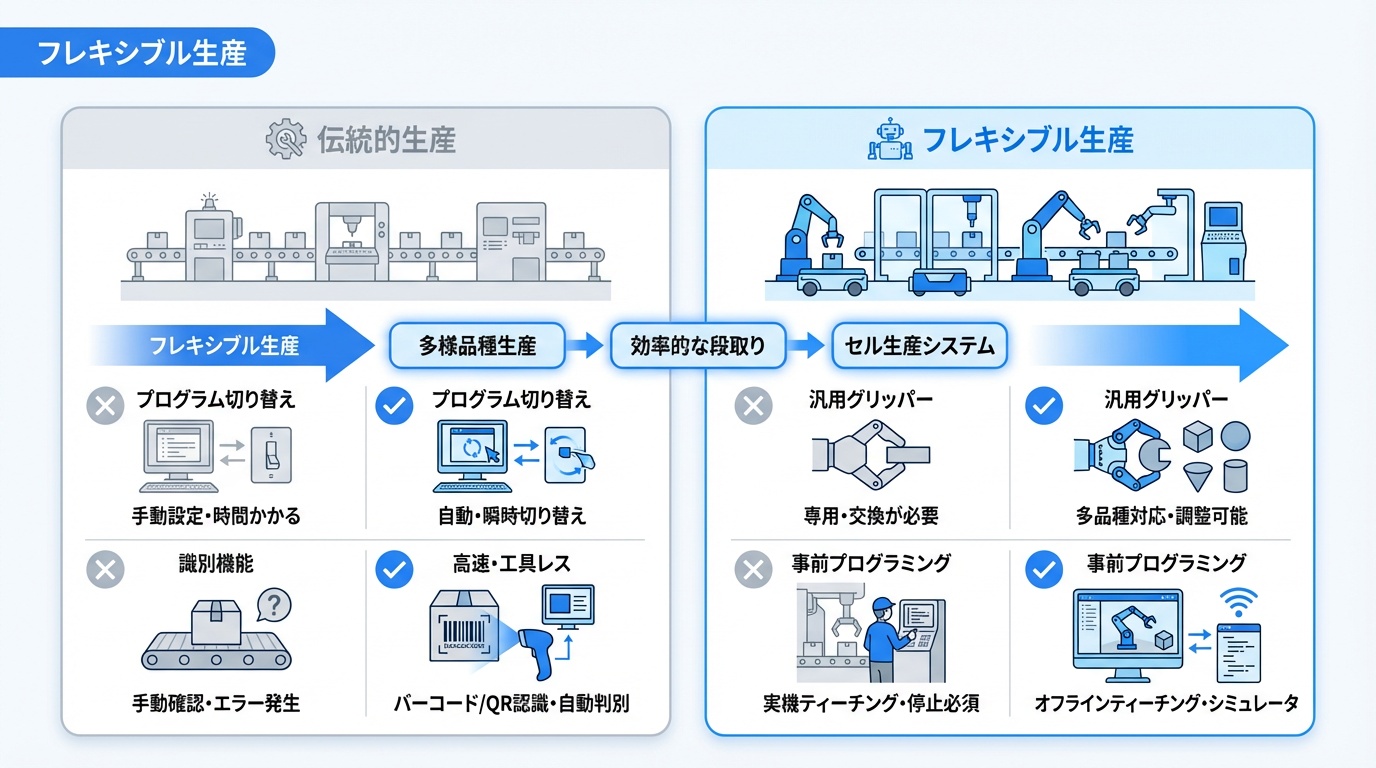
多品種少量生産に対応するための組立ロボット活用法を解説します。
多品種少量生産への対応
製品バリエーションの増加に対応するための技術です。
- プログラム切替:品種ごとのプログラム自動選択
- 汎用ハンド:複数部品に対応するグリッパー
- クイックチェンジ:ハンドの自動交換システム
- 識別システム:バーコード、QRコードで品種識別
段取り替えの効率化
段取り替え時間の短縮が生産性向上の鍵です。
- オフライン教示:シミュレーターでの事前プログラミング
- ダイレクトティーチング:協働ロボットの直接教示
- パラメトリック教示:寸法変更のみで品種対応
- 治具交換:クイックチェンジ治具システム
セル生産方式
協働ロボットを活用したセル生産が普及しています。
- 人+ロボット協調:複雑な作業は人、単純作業はロボット
- フレキシブルレイアウト:生産量に応じたライン組替え
- AGV/AMR連携:部品供給と製品搬出の自動化
- 工程統合:検査・梱包までの一貫セル
導入効果とROI
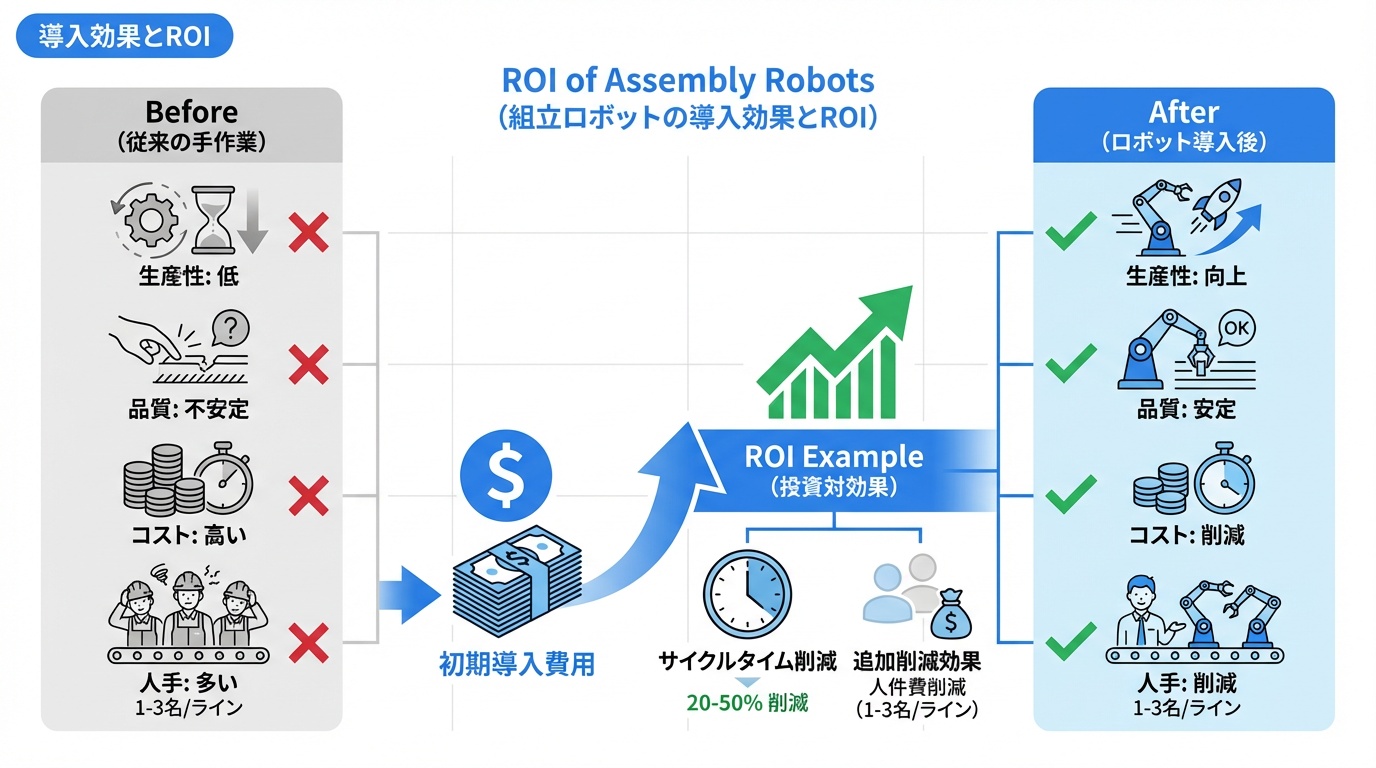
組立ロボット導入の費用対効果を解説します。
生産性向上
- サイクルタイム短縮:20〜50%の時間短縮
- 稼働率向上:24時間稼働で設備稼働率90%以上
- 段取り替え削減:自動切替で停止時間最小化
- ライン人員:1ライン2〜3名削減可能
品質安定化
- 不良率低減:50〜80%の不良削減
- トレーサビリティ:全数の組立データ記録
- ポカヨケ:部品間違いの自動検知
- 検査自動化:組立と検査の一体化
導入コストの目安
| 項目 | 費用目安 |
|---|---|
| ロボット本体 | 200〜1,500万円/台 |
| エンドエフェクタ | 50〜300万円 |
| ビジョンシステム | 100〜500万円 |
| 制御盤・システム | 100〜500万円 |
| 治具・周辺設備 | 100〜1,000万円 |
| システムインテグレーション | 500〜2,000万円 |
ROI計算例
以下の条件でROIを試算します。
- 初期投資:3,000万円(ロボット+周辺設備+SI費用)
- 削減人件費:年間1,200万円(3名×400万円)
- 不良削減効果:年間300万円
- 年間コスト削減:1,500万円
- 保守費用:年間150万円
- 年間純効果:1,350万円
- 投資回収期間:約2.2年
|
AINOW編集部
|
ROI算出時は、人件費削減だけでなく品質向上・不良削減効果も含めて評価することが重要です。数値化しにくい効果も見落とさないようにしましょう。 |
導入時の課題

組立ロボット導入で直面する主な課題と対策を解説します。
ワーク供給
部品をロボットに供給する方法の設計が重要です。
- 整列供給:パレット、トレイに整列して供給
- パーツフィーダー:振動フィーダーで姿勢を揃える
- ビンピッキング:バラ積みからビジョンで取り出し
- 課題:部品形状・材質による難易度差、段取り替え対応
治具設計
ワーク固定治具の設計が組立精度を左右します。
- 位置決め精度:ロボット精度以上の治具精度が必要
- クランプ方式:製品に傷をつけない固定方法
- アクセス性:ロボット作業域と治具干渉の回避
- 多品種対応:治具交換 vs. 汎用治具の選択
タクトタイム達成
要求されるサイクルタイムの達成が必要です。
- 動作最適化:無駄な動きの排除、経路最適化
- 並行作業:複数ロボットの協調、ワーク搬送との同期
- ツール交換:交換時間の最小化 or 複合ツール化
- シミュレーション:事前の動作検証でボトルネック特定
システムインテグレーション
周辺設備との連携が課題になることがあります。
- 既存設備との連携:PLC、搬送装置、検査機との接続
- 安全対策:安全柵、光カーテン、安全PLC
- データ連携:上位システム(MES)との接続
最新動向(2026年)
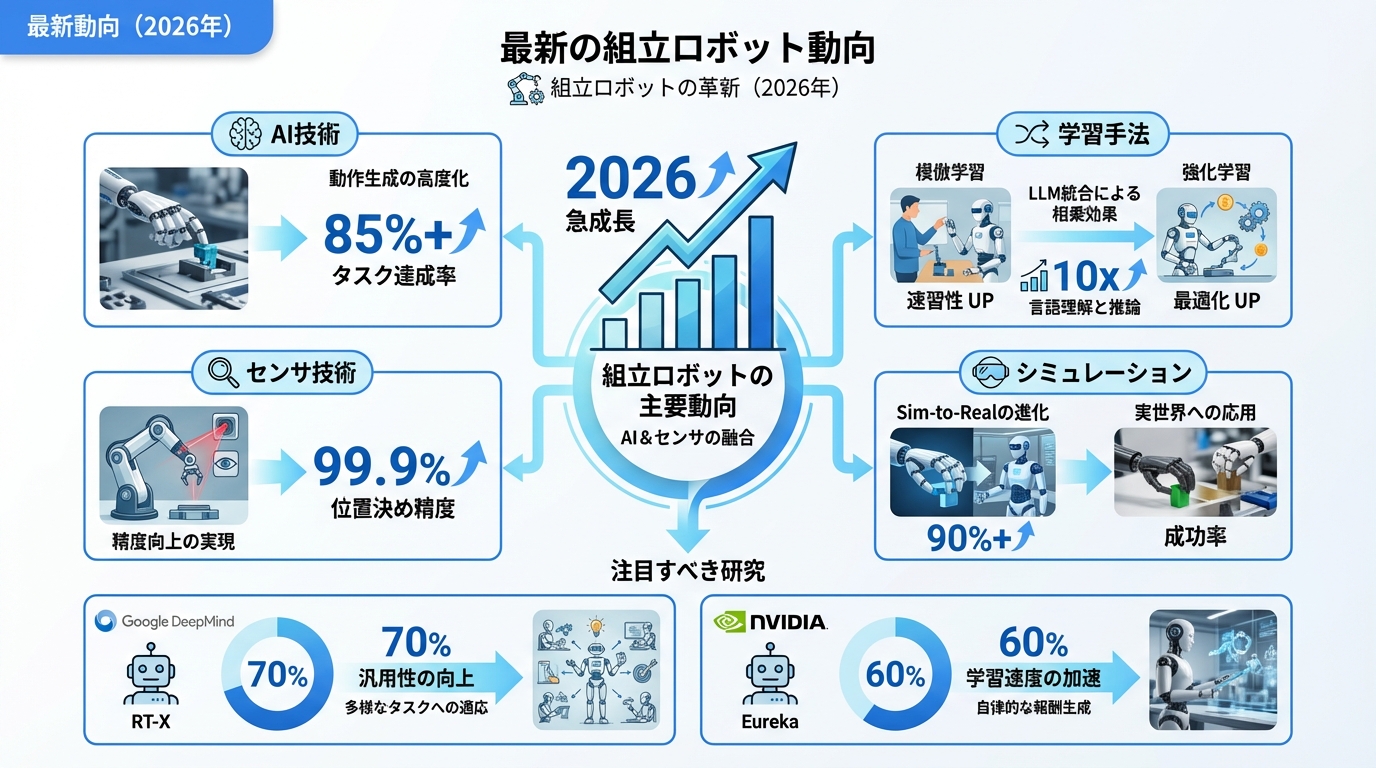
組立ロボット分野の最新技術動向を解説します。
AIによる組立動作生成
AIが組立動作を自動で生成・最適化する技術が進化しています。
- 模倣学習:人の作業を観察して動作を学習
- 強化学習:試行錯誤で最適動作を獲得
- 大規模言語モデル(LLM)連携:自然言語指示からの動作生成
- Sim-to-Real:シミュレーターで学習し実機に転移
- 代表研究:Google DeepMind RT-X、NVIDIA Eureka
力覚センサーの進化
力覚センシングの高精度化・低コスト化が進んでいます。
- 高分解能化:0.01N以下の微小力検出
- 高速応答:1kHz以上のサンプリング
- 小型軽量化:エンドエフェクタへの組み込み
- 低コスト化:従来の1/5〜1/10の価格帯
デジタルツインと予知保全
仮想空間と実機を連携させる技術が普及しています。
- リアルタイム同期:実機の状態を仮想空間に再現
- 動作検証:本番前にシミュレーターで検証
- 予知保全:AIが故障予兆を検知
- 最適化:仮想空間での動作・パラメータ最適化
モバイルマニピュレータ
AMR(自律走行ロボット)とロボットアームを組み合わせた移動型ロボットが登場しています。
- 構成:AMR + 協働ロボット
- 用途:複数ステーションへの移動組立、搬送+作業の一体化
- 代表製品:KUKA KMR iiwa、Omron LD + TM Robot
|
AINOW編集部
|
2026年時点では、AIによる動作生成はまだ研究段階の技術が多いですが、協働ロボットの直感的教示とビジョン技術の進化は実用レベルに達しています。 |
よくある質問
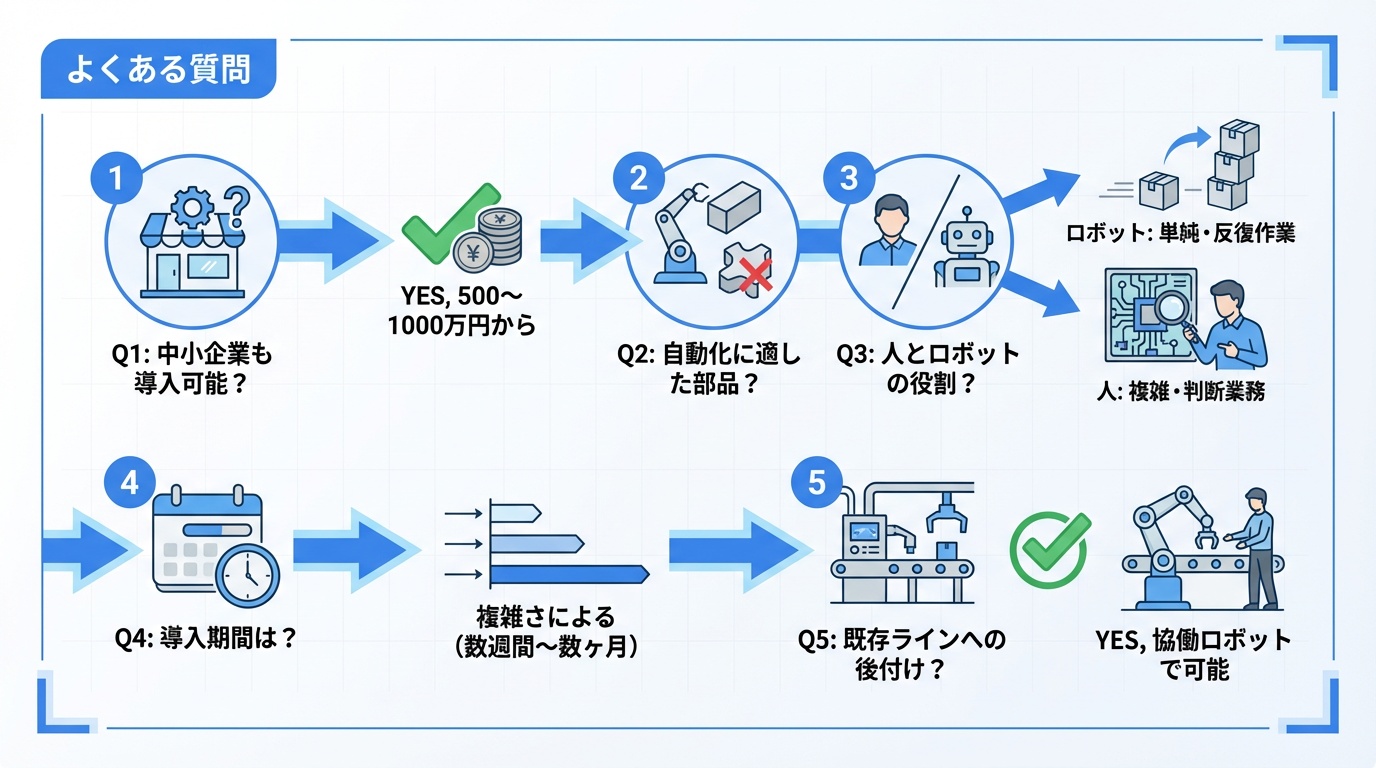
Q. 組立ロボットは中小企業でも導入できますか?
はい、協働ロボットの普及により、500〜1,000万円程度から導入可能になっています。安全柵不要で省スペース、直感的な教示で専門知識がなくても運用できます。
Q. どのような部品が組立自動化に適していますか?
定型的な形状、一定の剛性がある部品が適しています。逆に、柔軟な部品(ケーブル、シート材)や、形状が一定でない部品は難易度が高くなります。
Q. 人の作業とロボットの使い分けは?
単純繰り返し作業、高精度作業、危険作業はロボット向き。複雑な判断、柔軟物の取り扱い、多品種少量は人向きです。協働ロボットで両者の協調も可能です。
Q. 導入にどのくらいの期間がかかりますか?
シンプルな用途で3〜6ヶ月、複雑なシステムで1〜2年が目安です。PoC(実証実験)を経て本導入する場合は、全体で1〜2年を見込みます。
Q. 既存の生産ラインに後付けできますか?
可能ですが、スペース、タクトタイム、安全対策の検討が必要です。協働ロボットは安全柵不要で後付けしやすく、既存ラインへの追加に適しています。
まとめ|組立ロボット導入ガイド

組立ロボットは、製造業の人手不足解消と品質向上を実現する重要な技術です。SCARA、垂直多関節、協働ロボットなど、用途に応じた最適な形態を選択し、ビジョンシステムや力覚センサーと組み合わせることで、従来困難とされた精密組立も自動化できます。
導入にあたっては、ワーク供給、治具設計、タクトタイム達成といった課題を事前に検討し、段階的な導入でノウハウを蓄積することが成功の鍵です。2026年現在、AIによる動作生成や力覚センサーの進化により、組立ロボットの適用範囲は急速に拡大しています。
まずは協働ロボットによる小規模な自動化から始め、効果を検証しながら拡大していくアプローチが有効です。専門のシステムインテグレーターに相談し、自社の生産課題に最適なソリューションを検討しましょう。
https://ainow.jp/robot-manipulation-guide/
https://ainow.jp/picking-robot-guide/
 GitHub Copilot
GitHub Copilot Replit Agent
Replit Agent Cline
Cline Dify
Dify Jinbaflow
Jinbaflow