
水中ロボットは、人間が直接アクセスできない水中環境で活躍するロボット技術です。海洋調査、インフラ点検、資源探査、環境モニタリングなど、幅広い分野で不可欠な存在となっています。本記事では、ROV・AUVの基本から最新技術まで徹底解説します。
水中ロボットとは?基本分類
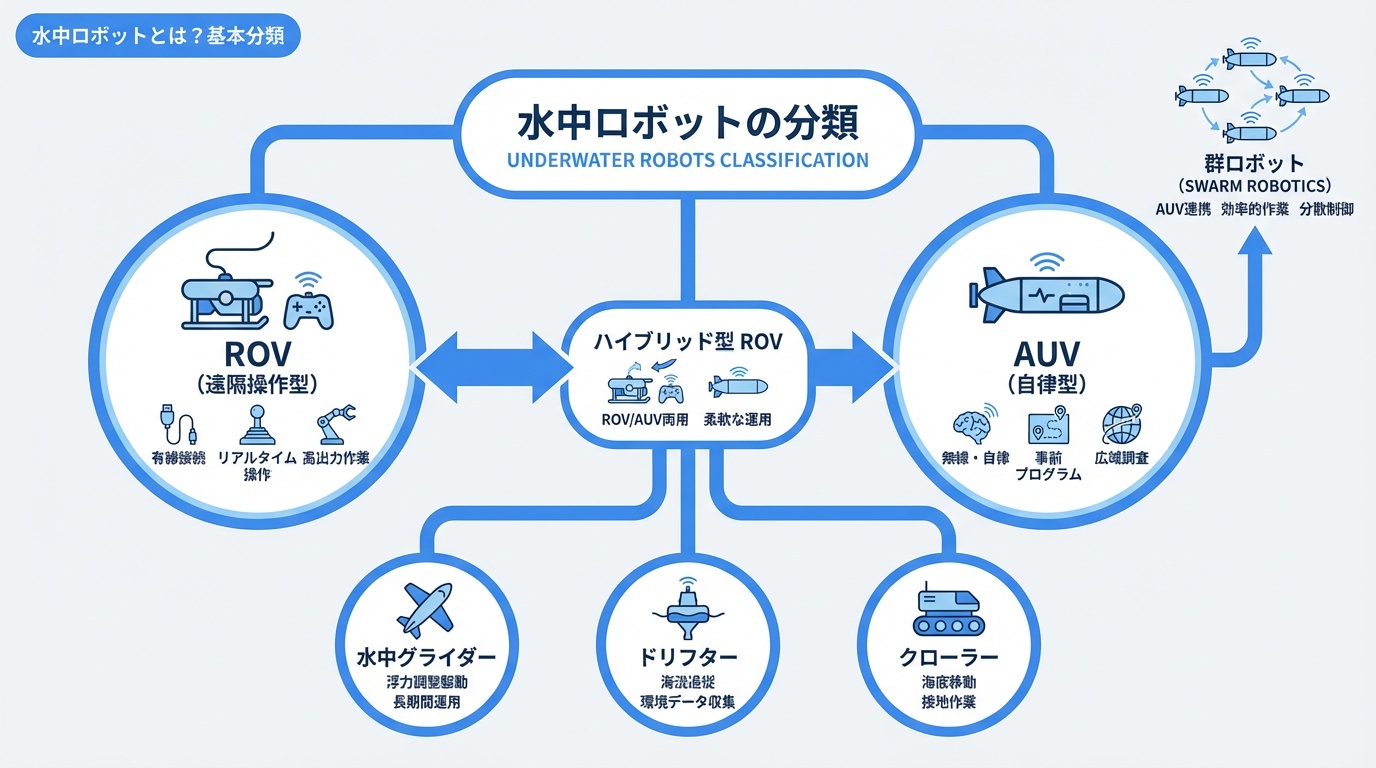
水中ロボットは、操作方式により大きく2種類に分類されます。それぞれに特徴と適した用途があります。
ROVとAUVの比較
| 項目 | ROV(遠隔操作型) | AUV(自律型) |
|---|---|---|
| 正式名称 | Remotely Operated Vehicle | Autonomous Underwater Vehicle |
| 操作方式 | ケーブル経由で人間が操作 | 搭載コンピュータで自律航行 |
| 電力供給 | ケーブル経由(無制限) | バッテリー(有限) |
| 通信 | リアルタイム(高帯域) | 限定的(音響通信) |
| 作業能力 | 高い(マニピュレータ搭載) | 限定的(調査中心) |
| 運用コスト | 高い(支援船必要) | 比較的低い |
| 主な用途 | 作業、点検、介入 | 調査、マッピング、監視 |
その他の水中ロボット
- ハイブリッドROV:ROVとAUVの機能を併せ持つ
- グライダー:浮力調整で長距離・長時間航行
- ドリフター:海流に乗って漂流観測
- クローラー:海底を走行する
スウォームロボティクスの技術は、複数AUVの協調運用にも応用されています。
ROV(遠隔操作型水中ロボット)
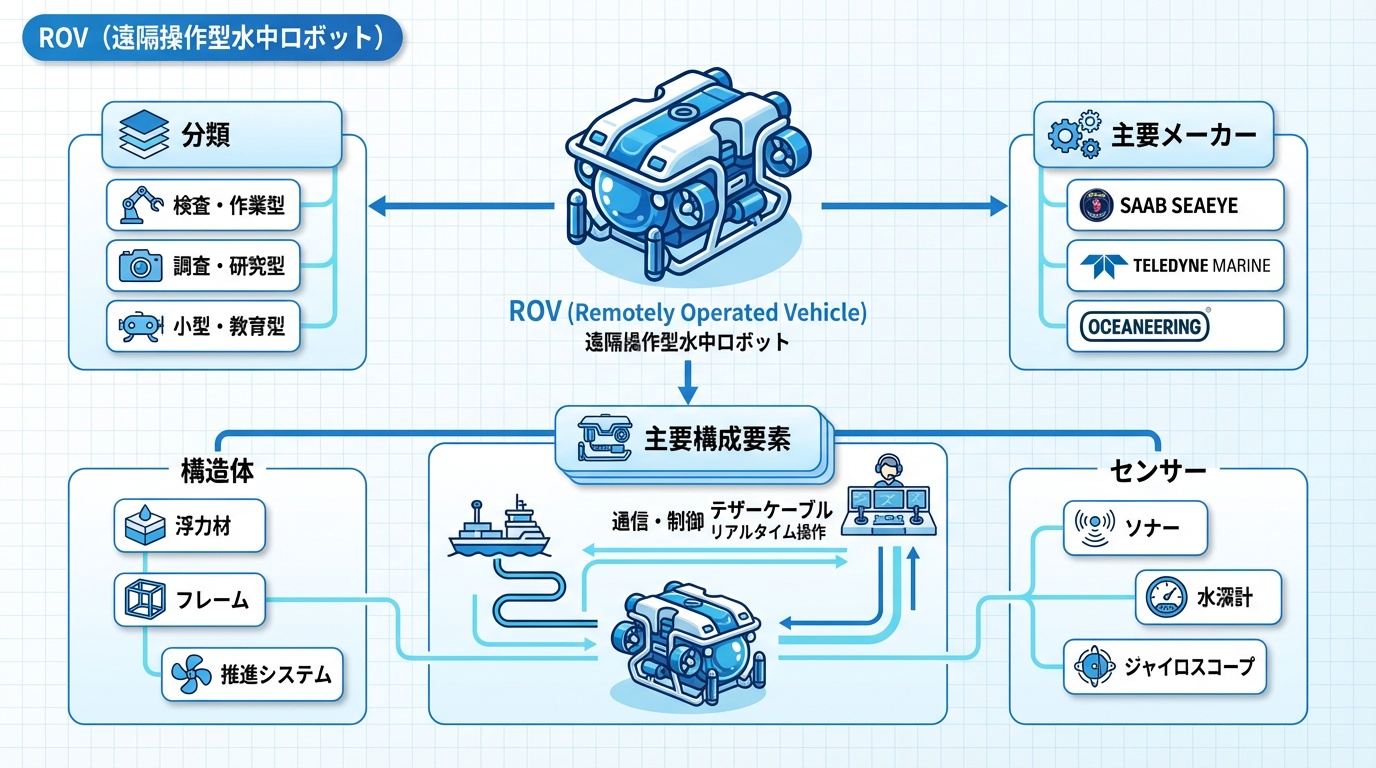
ROVは、ケーブル(テザー)で母船と接続され、オペレーターがリアルタイムで操作するロボットです。電力供給と高速通信が可能なため、複雑な作業に適しています。
ROVのクラス分類
| クラス | 深度 | 出力 | 用途 |
|---|---|---|---|
| Micro | 〜100m | 〜3kW | 点検、調査 |
| Mini | 〜300m | 〜15kW | 点検、軽作業 |
| Light Work Class | 〜2000m | 〜50kW | 軽〜中作業 |
| Work Class | 〜3000m | 〜150kW | 重作業、建設 |
| Heavy Work Class | 〜6000m | 200kW以上 | 深海作業 |
ROVの主要コンポーネント
- フレーム:機体構造、浮力材
- 推進系:スラスター(電動/油圧)
- カメラ:HDカメラ、ライト
- マニピュレータ:作業用ロボットアーム
- センサー:ソナー、深度計、ジャイロ
- テザー:電力・通信ケーブル
- TMS:テザー管理システム
主要ROVメーカー
| メーカー | 国 | 代表製品 | 特徴 |
|---|---|---|---|
| Oceaneering | 米国 | Millennium Plus | 業界最大手、深海対応 |
| Saab Seaeye | スウェーデン | Leopard, Falcon | 電動ROV |
| Forum Energy | 英国 | XLe, Comanche | 多目的 |
| Deep Trekker | カナダ | DTG3, Revolution | 小型、ポータブル |
| BlueROV | 米国 | BlueROV2 | 低コスト、オープンソース |
AUV(自律型水中ロボット)

AUVは、テザーなしで自律的に水中を航行するロボットです。バッテリー駆動で、事前プログラムされたミッションを実行します。
AUVの種類
| タイプ | 特徴 | 用途 |
|---|---|---|
| 魚雷型 | 高速、長距離 | 広域調査、マッピング |
| ホバリング型 | 定点保持、精密操作 | 点検、詳細調査 |
| グライダー型 | 超長時間、省エネ | 海洋観測、環境監視 |
| バイオミメティック | 生物模倣、静音 | 調査、軍事 |
AUVの自律航行技術
- 慣性航法:IMU/INSによるデッドレコニング
- DVL:ドップラー速度計で対地速度測定
- USBL/LBL:音響測位システム
- SLAM:同時自己位置推定・地図作成
- 衝突回避:ソナーによる障害物検知
主要AUVメーカー
| メーカー | 国 | 代表製品 | 特徴 |
|---|---|---|---|
| Kongsberg | ノルウェー | HUGIN, MUNIN | 大型、高性能 |
| Teledyne Gavia | アイスランド | Gavia | モジュール式 |
| Hydroid (Kongsberg) | 米国 | REMUS | 軍事・商用 |
| Ocean Infinity | 英国 | Armada | フリート運用 |
| Bluefin Robotics | 米国 | Bluefin-21 | 深海対応 |
SLAM技術はAUVの自律航行でも重要な役割を果たします。
水中ロボットの応用分野
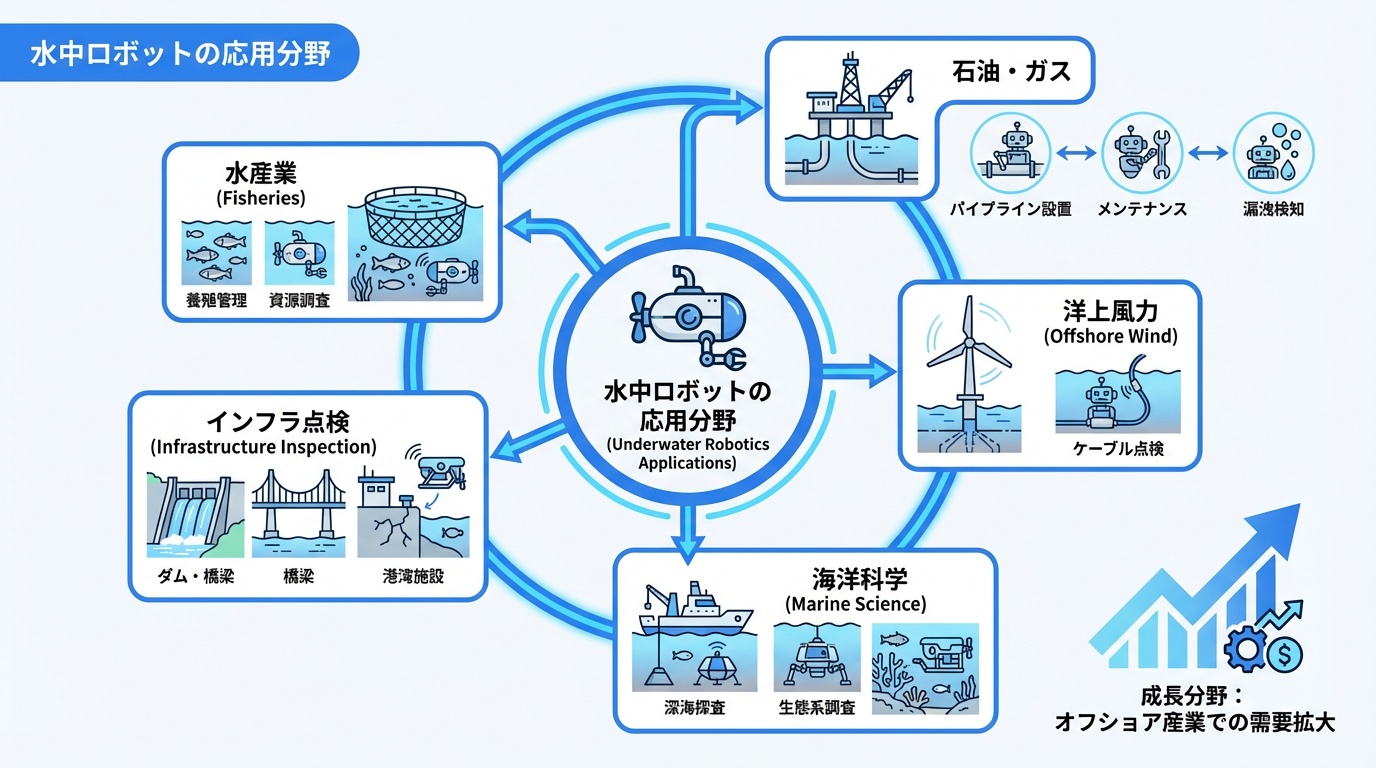
水中ロボットは様々な産業分野で活用されています。
1. 石油・ガス産業
海底油田・ガス田の開発・保守に不可欠です。
- 海底パイプライン敷設・点検
- 海底設備の設置・メンテナンス
- 掘削支援
- 漏洩検知
2. 洋上風力発電
洋上風力発電所の建設・保守で需要が急増しています。
- 海底ケーブル敷設・点検
- 基礎構造物点検
- 海洋環境調査
3. 海洋科学調査
- 海底地形マッピング
- 海洋生物調査
- 深海探査
- 環境モニタリング
4. インフラ点検
- 港湾施設点検
- 橋梁水中部点検
- ダム点検
- 船舶船底点検
5. 水産業
- 養殖場の監視・点検
- 漁網点検
- 水質モニタリング
6. 防衛・セキュリティ
- 機雷探知・処理
- 港湾警備
- 潜水艦救難
- 海底監視
水中ロボットの技術課題
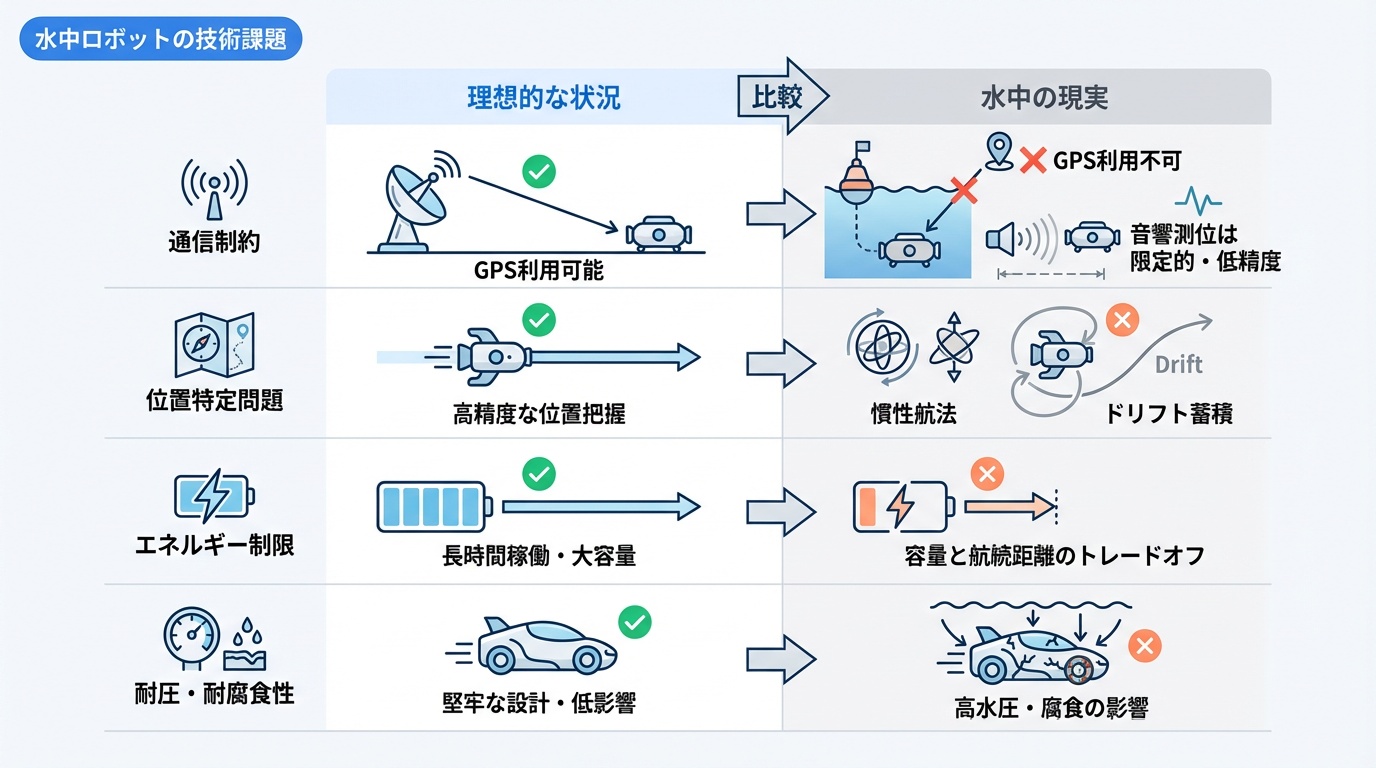
水中環境特有の技術課題があります。
通信の制約
| 通信方式 | 速度 | 距離 | 用途 |
|---|---|---|---|
| 光ケーブル | Gbps | 数km | ROVテザー |
| 音響通信 | kbps | 数km | AUV指令 |
| 光無線通信 | Mbps | 〜100m | 近距離データ転送 |
| 電波 | ほぼ不可 | 〜数m | 海面付近のみ |
位置推定の課題
- GPSが水中では使用不可
- 音響測位は精度に限界
- 慣性航法はドリフトが累積
- 水中SLAMは発展途上
エネルギーの制約
- バッテリー容量 vs 航続距離のトレードオフ
- 高圧環境でのバッテリー設計
- 充電・交換のためのドッキングステーション
耐圧・耐食
- 深海では数百気圧の水圧
- 海水による腐食対策
- 長期運用での信頼性確保
水中ロボットの最新動向(2026年)
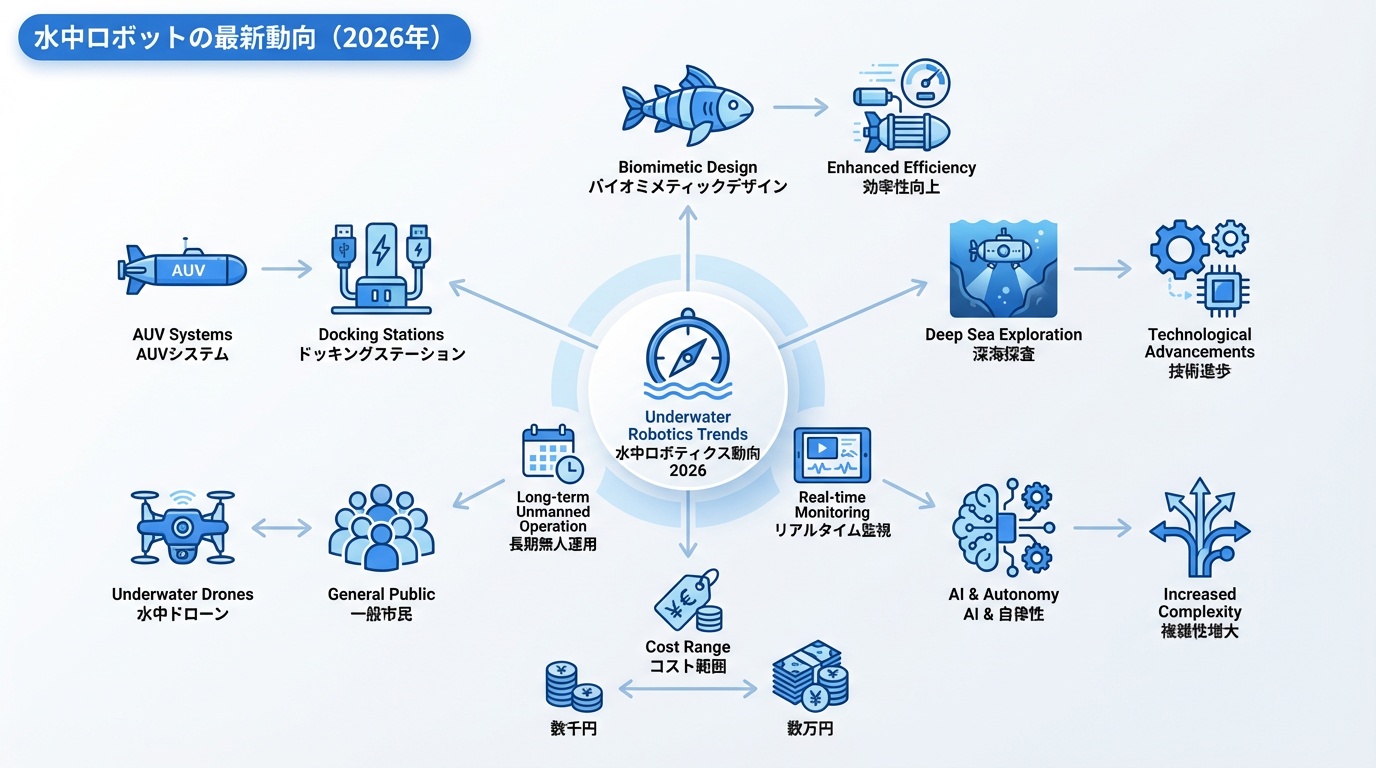
水中ロボット技術は急速に進化しています。
1. 常駐型AUV
海底に設置したドッキングステーションから、定期的にミッションを実行するAUVシステムが実用化されています。
- 長期無人運用
- リアルタイム監視
- コスト大幅削減
2. 水中ドローンの普及
小型・低コストの水中ドローンが一般向けにも普及しています。
- 数万円〜数十万円の価格帯
- レジャー、釣り、ダイビング
- 簡易点検用途
3. バイオミメティック設計
魚やクラゲなど海洋生物を模倣した水中ロボットの開発が進んでいます。
- 高い遊泳効率
- 静音性
- 海洋生物への影響軽減
4. 深海探査の進展
- フルオーシャンデプス(11,000m級)対応
- 深海資源調査
- 極限環境探査
5. AI・自律化の高度化
- リアルタイム物体認識
- 自律的な意思決定
- 複数AUVの協調運用
Embodied AI技術は水中ロボットの自律化にも貢献しています。
まとめ|水中ロボットの展望
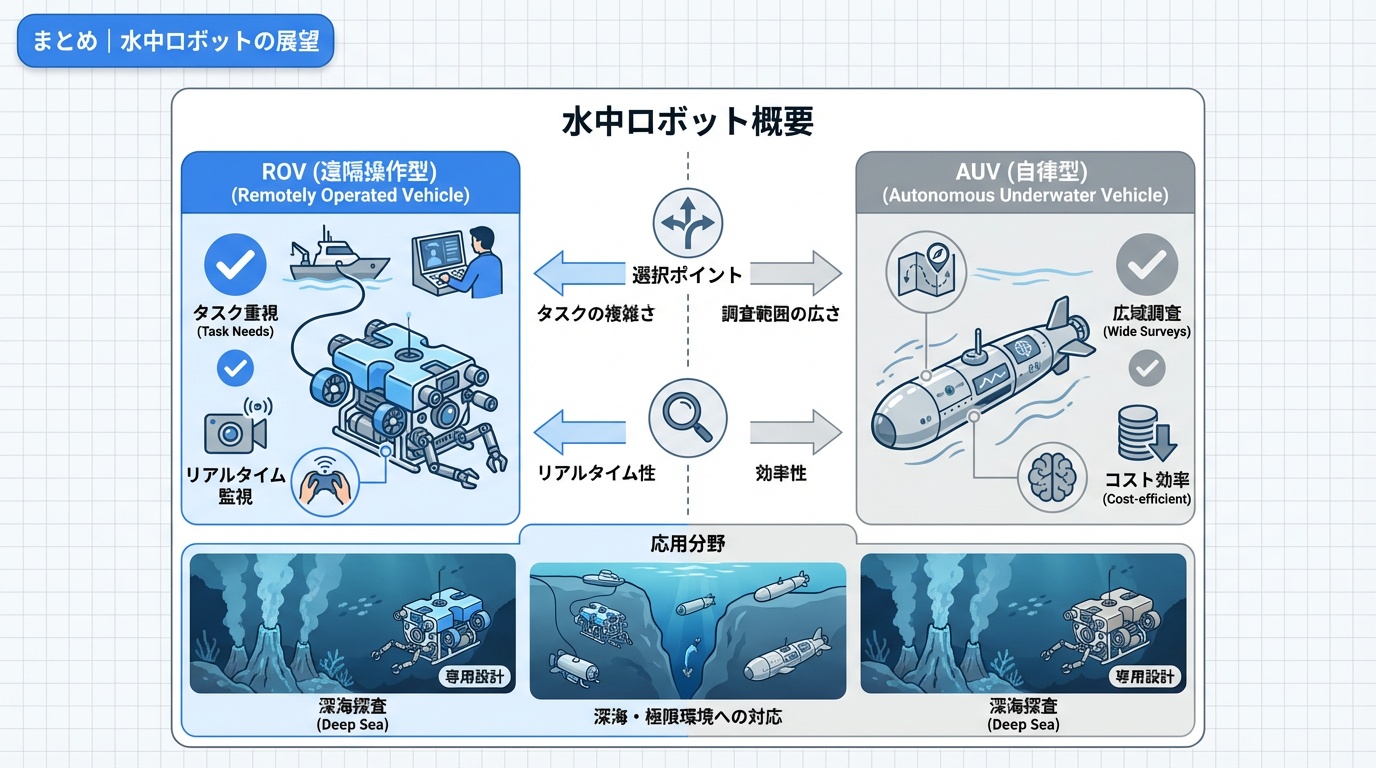
水中ロボットは、海洋という未開拓フロンティアを探索・活用するための重要な技術です。
ROV vs AUVの選定ポイント
- 作業が必要 → ROV(マニピュレータ)
- 広域調査 → AUV(自律航行)
- リアルタイム監視 → ROV(高速通信)
- コスト重視 → AUV(支援船不要の場合)
- 深海 → 専用設計(ROV/AUV両方)
今後の展望
- 常駐型・長期運用の普及
- 自律化・AI化の進展
- 洋上風力市場での需要拡大
- 深海資源開発への応用
- 海洋環境保全への貢献
関連記事としてフィジカルAIの動向もご覧ください。
https://ainow.jp/swarm-robotics-guide/
https://ainow.jp/embodied-ai-guide/