
遠隔操作ロボット(テレプレゼンスロボット)は、物理的に離れた場所にいながら、あたかもその場にいるかのように存在感を持ち、作業を行うことを可能にする技術です。VR/AR技術、触覚フィードバック、5G通信の発展により、遠隔操作の精度と臨場感は飛躍的に向上しています。本記事では、遠隔操作ロボットの基本から最新技術まで徹底解説します。
遠隔操作ロボットとは?基本分類
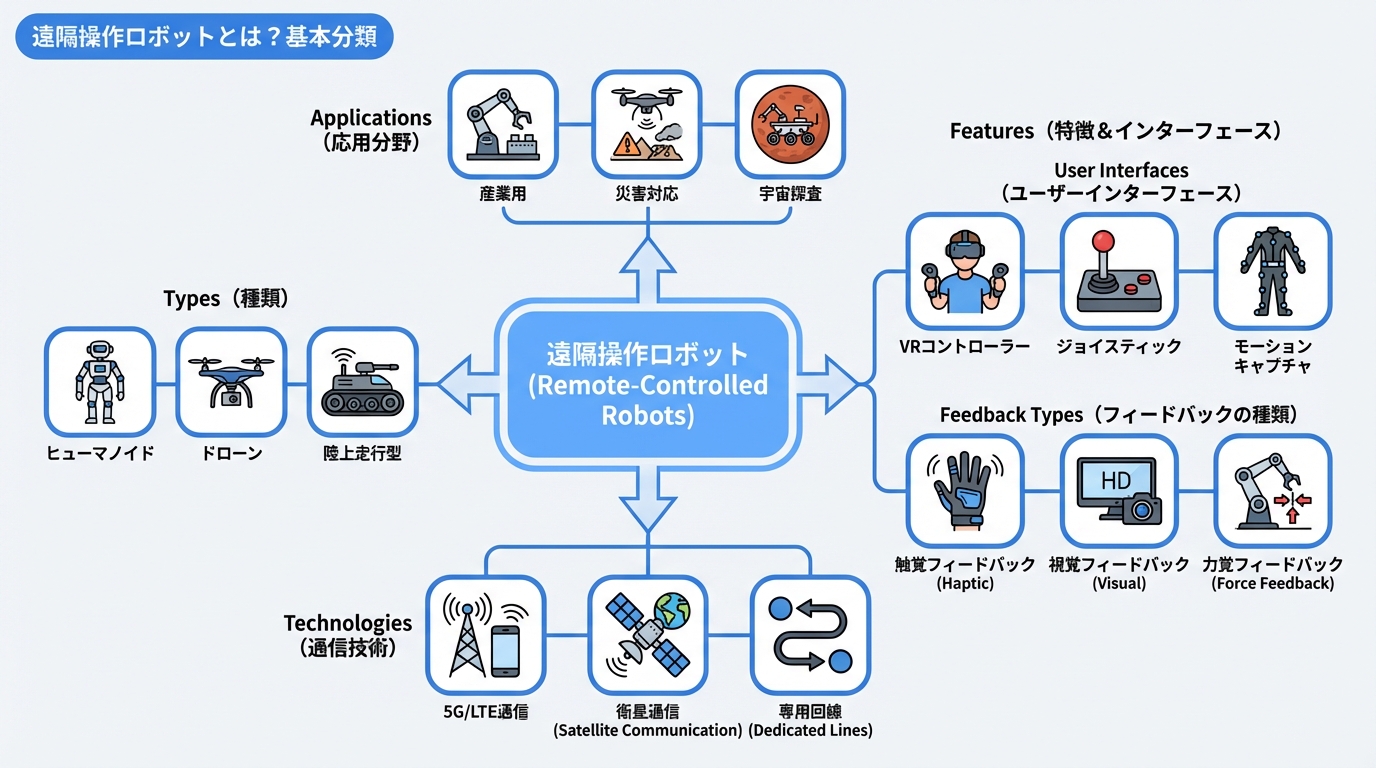
遠隔操作ロボットは、用途と技術によって複数のカテゴリに分類されます。それぞれに特徴と適した応用分野があります。
遠隔操作ロボットの種類
| 種類 | 特徴 | 主な用途 |
|---|---|---|
| テレプレゼンスロボット | 移動・映像・音声通信 | オフィス、医療、教育 |
| テレオペレーションロボット | 精密作業を遠隔実行 | 手術、製造、保守 |
| アバターロボット | 人間の動きを再現 | 接客、イベント、介護 |
| エクソスケルトン連携 | 装着型デバイスで操作 | 危険作業、リハビリ |
遠隔操作の技術スタック
- 通信基盤:5G/LTE、衛星通信、専用回線
- 映像伝送:低遅延ストリーミング、3D映像
- 操作インターフェース:VRコントローラー、ジョイスティック、モーションキャプチャ
- フィードバック:力覚、触覚、振動フィードバック
- AI支援:自律補助、衝突回避、動作予測
Embodied AI技術は遠隔操作ロボットの自律性向上に貢献しています。
テレプレゼンスロボット
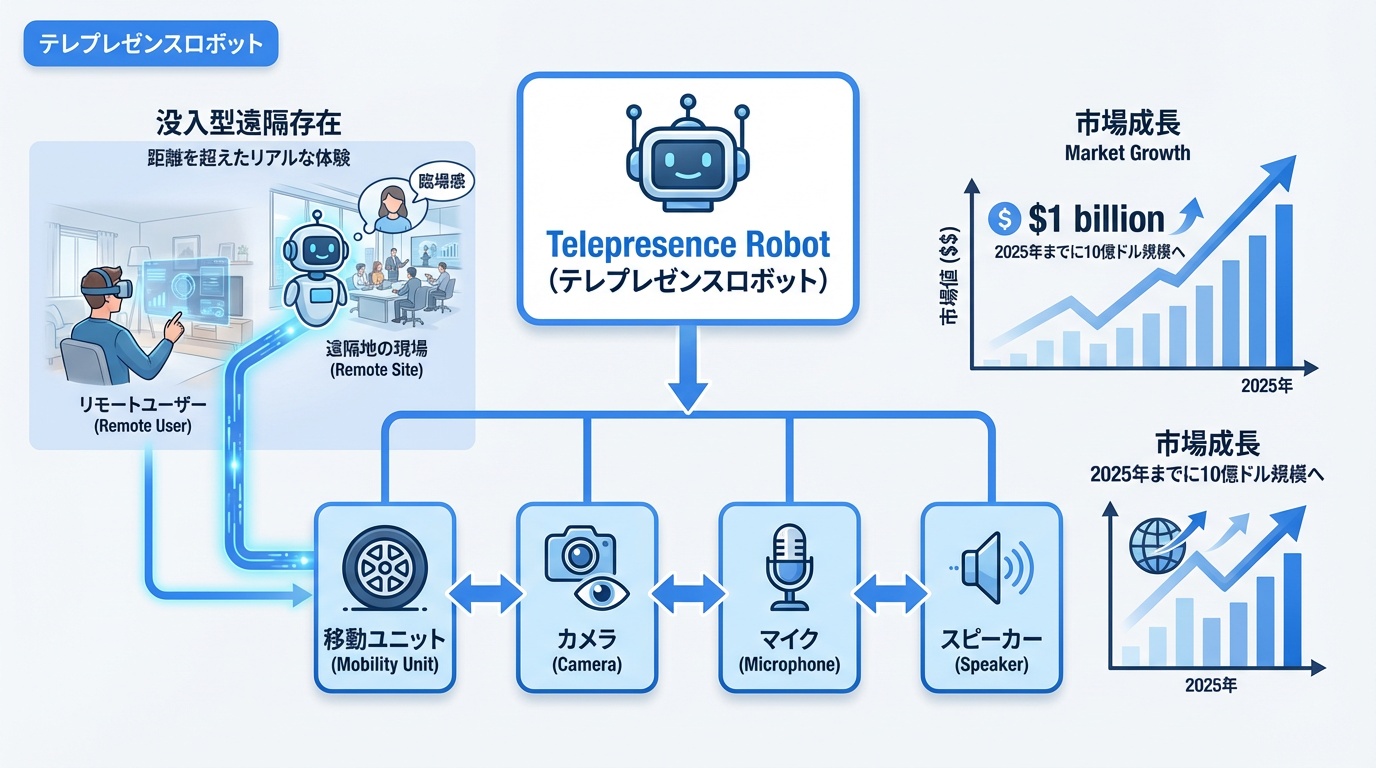
テレプレゼンスロボットは、遠隔地から「存在」を伝えることに特化したロボットです。移動可能な筐体にカメラ・マイク・スピーカーを搭載し、ビデオ会議を超えた臨場感を提供します。
テレプレゼンスロボットの構成要素
| 要素 | 技術 | 役割 |
|---|---|---|
| 移動機構 | 車輪式、全方位移動 | 空間内の自由移動 |
| カメラ | パン・チルト、広角、ズーム | 周囲の視認 |
| ディスプレイ | タブレット、専用モニター | 操作者の顔表示 |
| マイク・スピーカー | ノイズキャンセリング、指向性 | 双方向通話 |
| 自律航行 | SLAM、障害物回避 | 安全な移動 |
主要テレプレゼンスロボット製品
| 製品名 | メーカー | 特徴 | 価格帯 |
|---|---|---|---|
| Double 3 | Double Robotics | シンプル、軽量 | 約40万円 |
| Beam | Suitable Technologies | 高品質映像・音声 | 約200万円 |
| temi | Temi | AI搭載、低価格 | 約50万円 |
| Ava | Ava Robotics | エンタープライズ向け | 約300万円 |
| Newme | ANA(avatarin) | アバター特化 | 非公開 |
テレオペレーションロボット
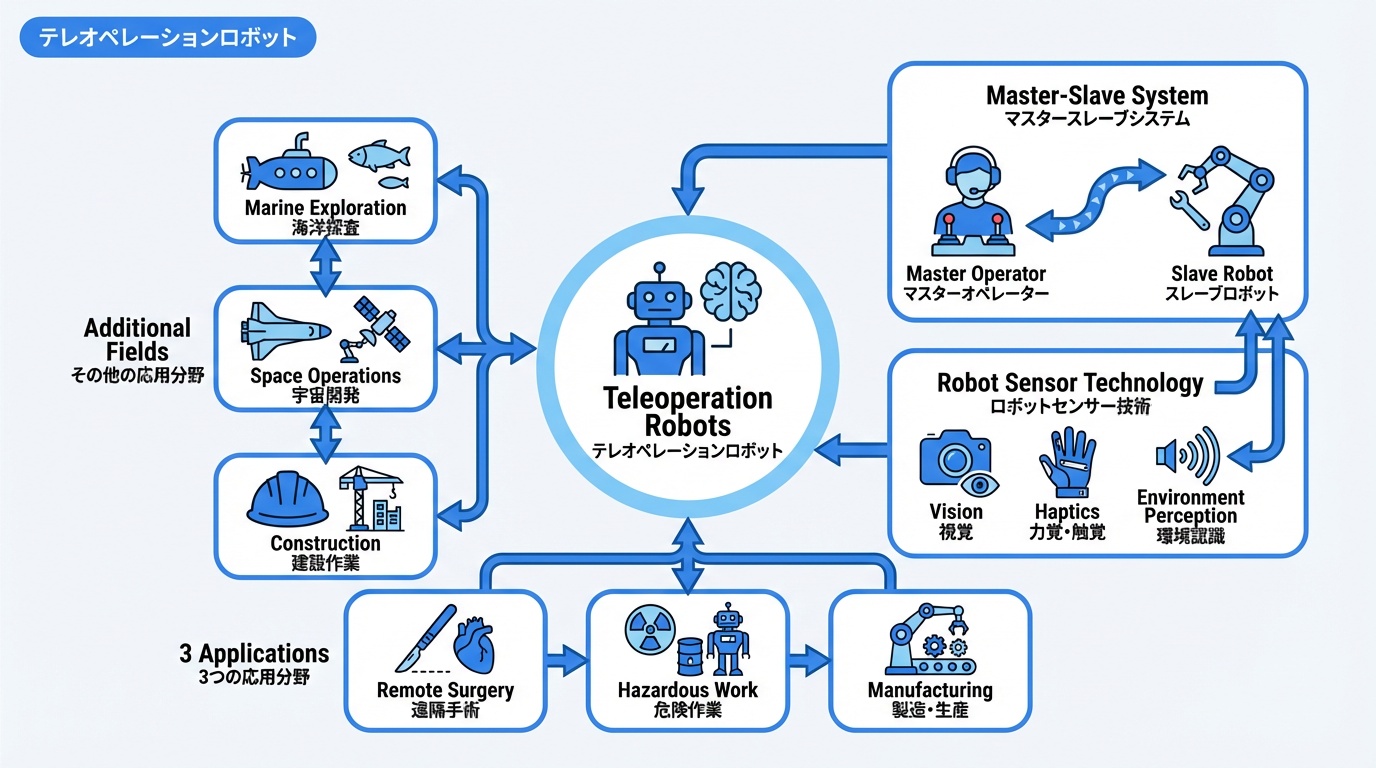
テレオペレーションは、遠隔地から実際の作業を行う技術です。単なる存在感の伝達を超え、精密な操作を可能にします。
テレオペレーションの応用分野
- 遠隔手術:ダヴィンチなどの手術支援ロボット
- 危険作業:原発内作業、爆発物処理
- 海洋・宇宙:深海探査、宇宙ステーション作業
- 製造業:遠隔保守、品質検査
- 建設:無人重機操作、解体作業
マスター・スレーブ方式
テレオペレーションの基本アーキテクチャはマスター・スレーブ方式です。
| 構成 | 役割 | 例 |
|---|---|---|
| マスター | 操作者側の入力装置 | ジョイスティック、VRコントローラー |
| スレーブ | 遠隔地のロボット本体 | アーム、移動体、作業機 |
| 通信 | 双方向データ伝送 | 5G、専用回線 |
| フィードバック | 力覚・触覚の伝達 | ハプティクスデバイス |
ロボットセンサー技術は遠隔操作の精度向上に不可欠です。
アバターロボット
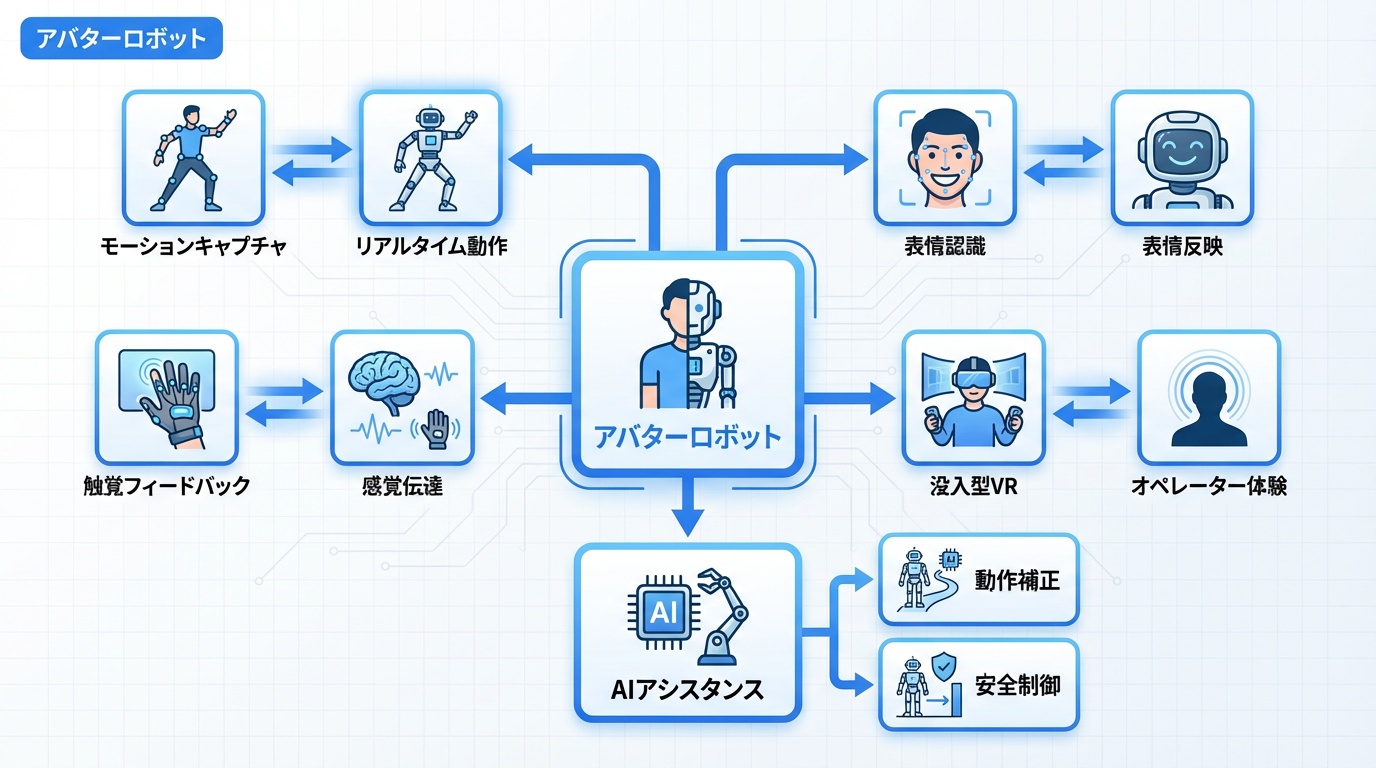
アバターロボットは、人間の「分身」として機能するロボットです。操作者の動きや表情をリアルタイムで再現し、まるでその場にいるかのような体験を提供します。
アバター技術の要素
- モーションキャプチャ:全身の動きをリアルタイム追跡
- 表情認識・再現:顔の表情をロボットに反映
- 触覚フィードバック:接触感覚を操作者に伝達
- 没入型VR:操作者のVR体験と連動
- AI自律補助:動作の補正、安全制御
国内外のアバターロボット開発
| プロジェクト | 組織 | 特徴 |
|---|---|---|
| avatar-in | ANA/avatarin | 空港・小売向けアバター |
| T-HR3 | トヨタ | ヒューマノイドアバター |
| TELESAR VI | 慶應大学 | 触覚伝達研究 |
| Model-H | Mira Robotics | 家事代行アバター |
| Surena IV | テヘラン大学 | 二足歩行アバター |
ヒューマノイドロボット技術はアバターロボットの基盤となっています。
触覚フィードバック技術(ハプティクス)
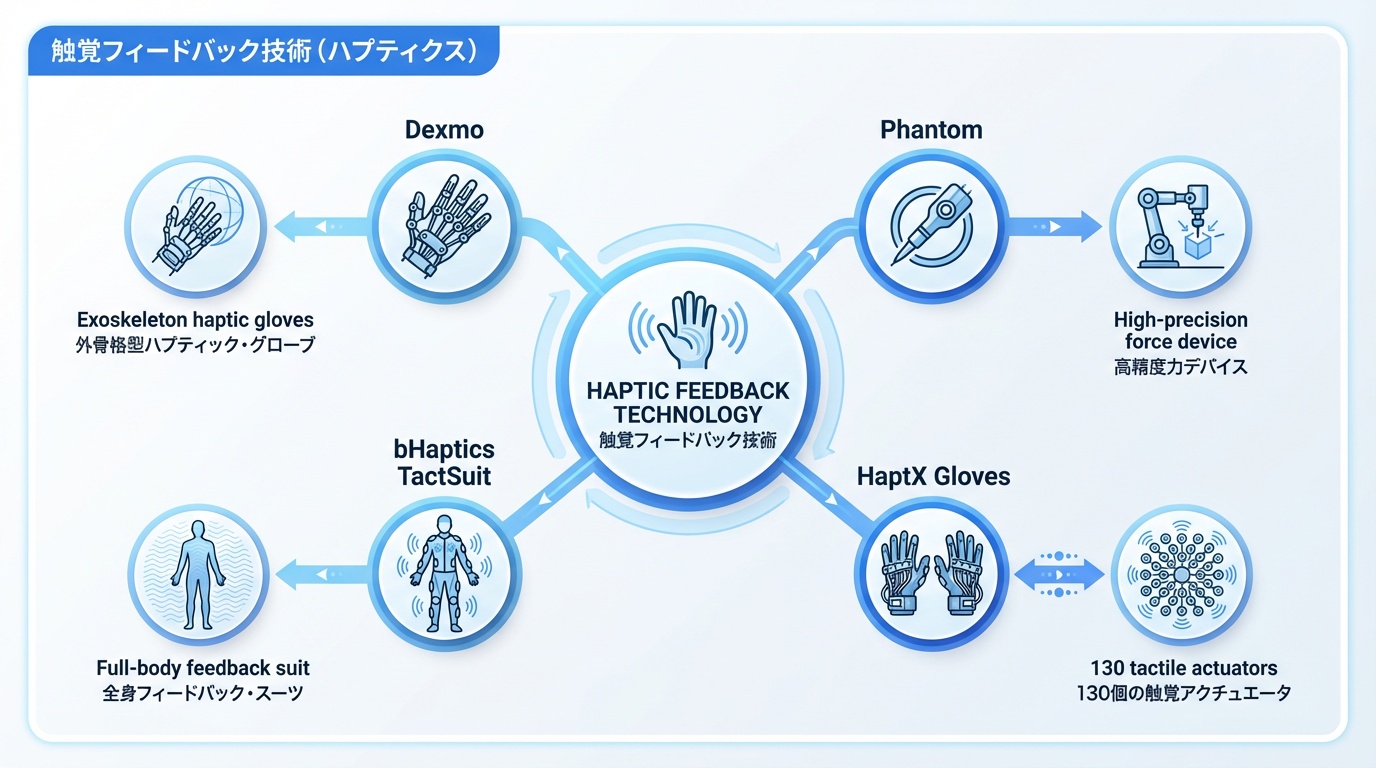
遠隔操作の臨場感を高める鍵となるのが触覚フィードバック技術です。力覚や触感を伝えることで、操作精度と安全性が向上します。
ハプティクスの種類
| 種類 | 技術 | 用途 |
|---|---|---|
| 力覚フィードバック | モーター、ブレーキ | 把持力、反力の伝達 |
| 振動フィードバック | 振動モーター、ピエゾ素子 | 接触感、テクスチャ |
| 皮膚感覚 | 触覚アレイ、空気圧 | 温度、圧力分布 |
| 全身フィードバック | スーツ型、ベスト型 | 没入感の向上 |
主要ハプティクス製品
- Phantom:3D Systems製、高精度力覚デバイス
- HaptX Gloves:触覚グローブ、130点の触覚アクチュエータ
- bHaptics TactSuit:全身振動フィードバックスーツ
- Dexmo:外骨格型触覚グローブ
通信技術と遅延問題
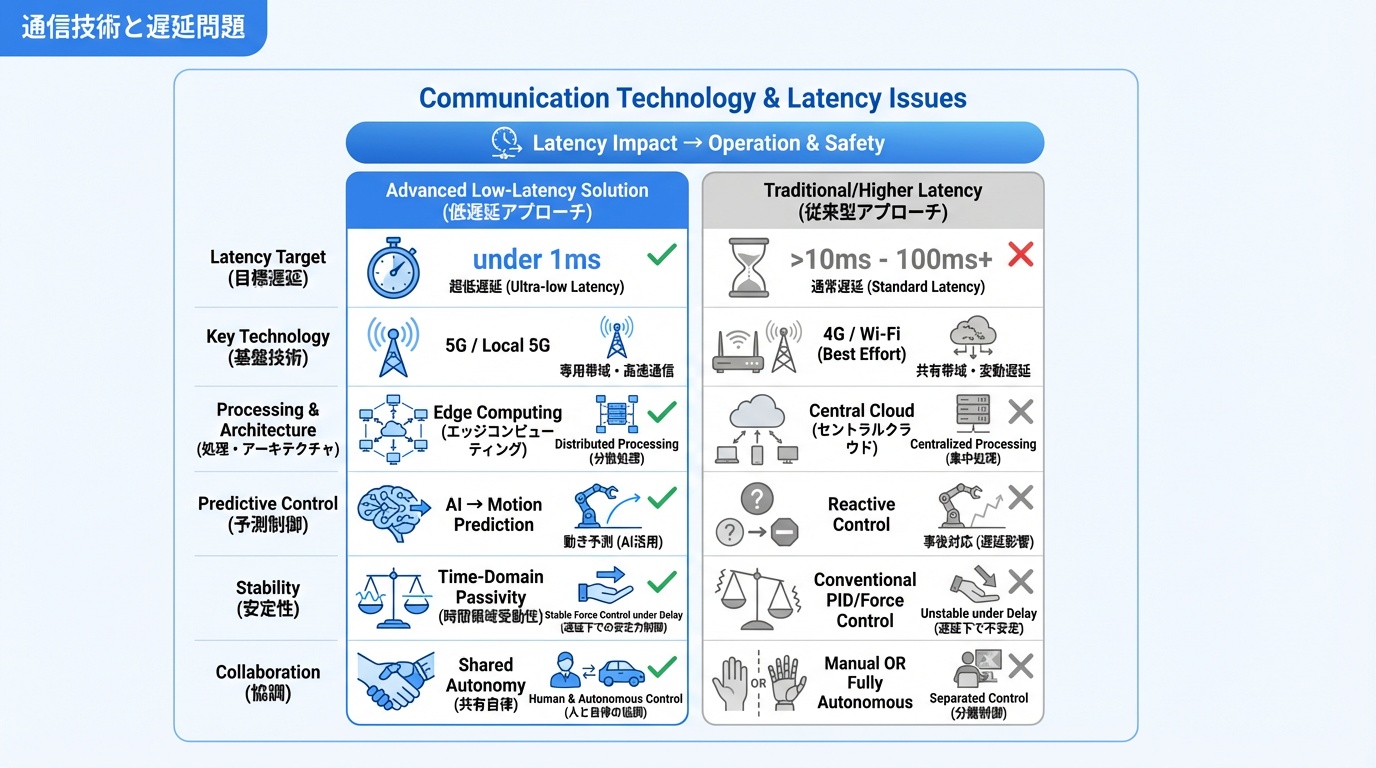
遠隔操作の最大の課題は通信遅延です。遅延が操作感と安全性に直接影響します。
遅延の影響
| 遅延時間 | 影響 | 許容される用途 |
|---|---|---|
| 〜50ms | ほぼ違和感なし | 遠隔手術、精密作業 |
| 50〜150ms | やや違和感あり | 一般的なテレオペレーション |
| 150〜300ms | 操作に支障 | 単純作業、監視 |
| 300ms以上 | リアルタイム操作困難 | 非同期操作、自律補助必須 |
遅延対策技術
- 5G/ローカル5G:超低遅延通信(1ms以下)
- エッジコンピューティング:処理の分散化
- 予測制御:AIによる動作予測
- Time-Domain Passivity:遅延下でも安定した力制御
- Shared Autonomy:人間と自律制御の協調
遠隔操作ロボットの応用分野
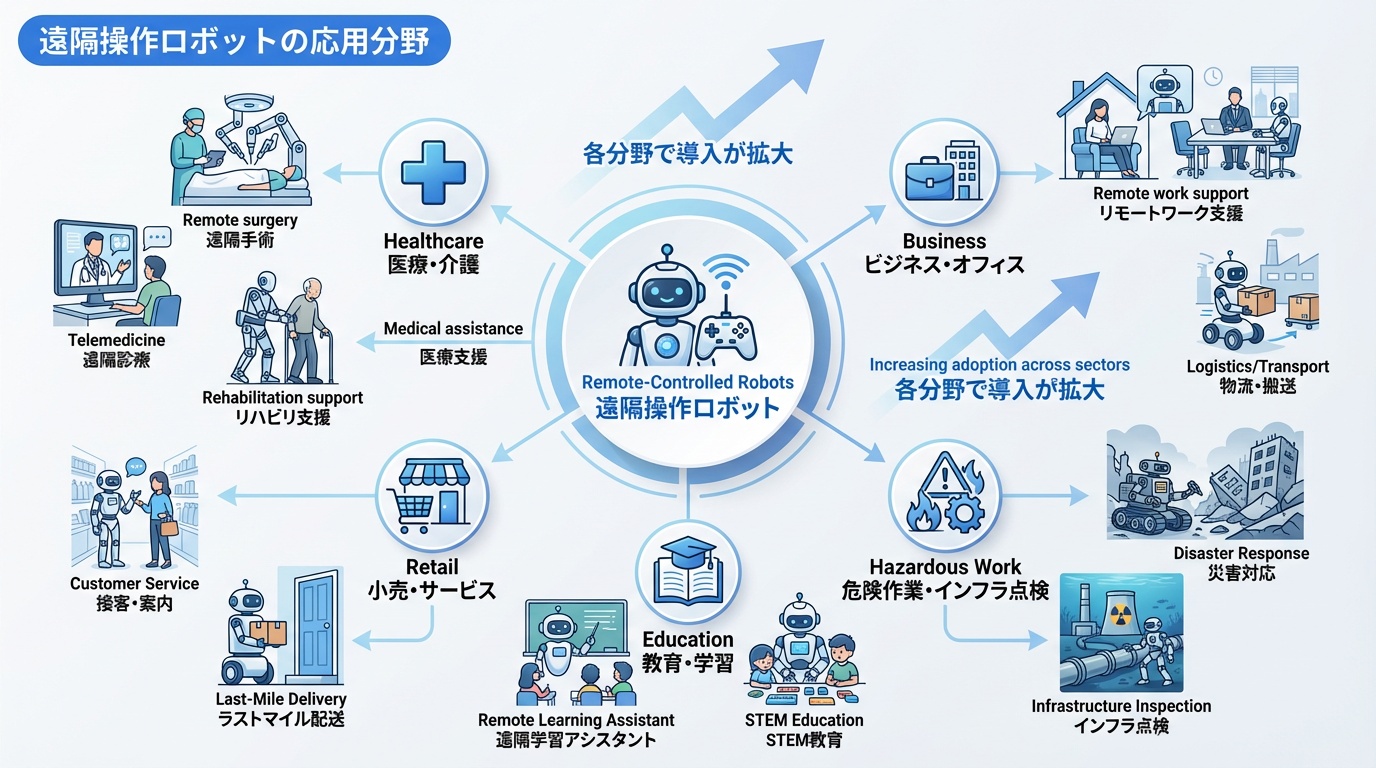
遠隔操作ロボットは多様な分野で活用されています。
1. 医療・ヘルスケア
- 遠隔手術(ダヴィンチ、hinotori)
- 遠隔診療・回診
- リハビリテーション支援
- 感染症病棟での医療支援
2. オフィス・ビジネス
- リモートワーク支援
- 工場の遠隔見学
- 展示会・イベント参加
- 海外拠点とのコミュニケーション
3. 危険作業
- 原子力施設の保守・廃炉作業
- 爆発物処理(EOD)
- 災害現場での救助活動
- 高所・閉所作業
4. 教育・研究
- 遠隔授業・実験参加
- 博物館・美術館のバーチャルツアー
- フィールドワークへの遠隔参加
5. サービス・小売
- 遠隔接客・コンシェルジュ
- ショールームでの商品説明
- 観光案内
最新動向(2026年)
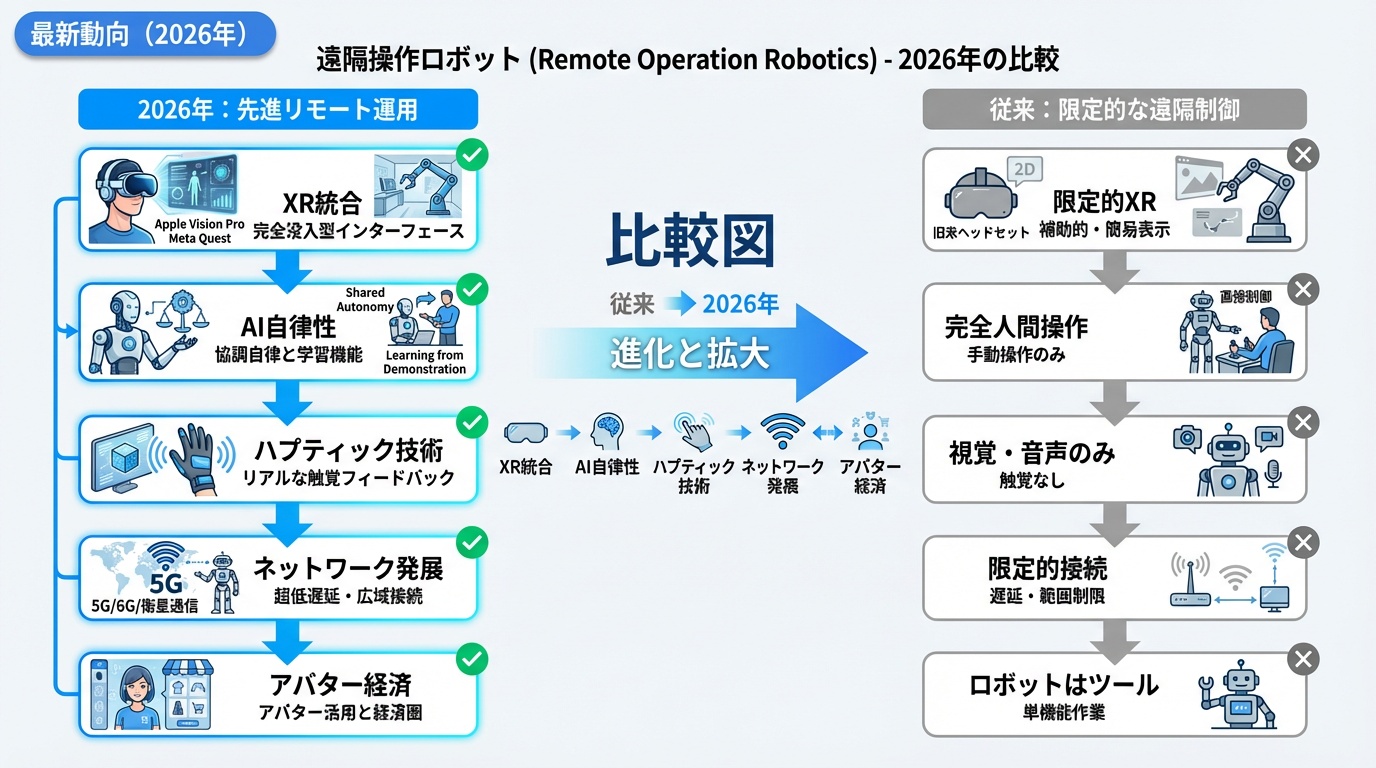
遠隔操作ロボット技術は急速に進化しています。
1. XR連携の高度化
- VR/AR/MRとの完全統合
- 空間コンピューティングとの連携
- Apple Vision Pro、Meta Quest対応
2. AI自律補助の進化
- Shared Autonomy(人間とAIの協調制御)
- Learning from Demonstration(操作の学習)
- 自動衝突回避・安全制御
3. 触覚技術の進歩
- より自然な触覚フィードバック
- 温度・テクスチャの伝達
- 軽量・低コスト化
4. ネットワーク基盤の整備
- 5Gカバレッジ拡大
- ローカル5Gの産業利用
- 衛星通信(Starlink等)との連携
5. アバター経済の萌芽
- 遠隔労働市場の形成
- アバターレンタルサービス
- バーチャル観光・体験
フィジカルAIの発展がアバター経済を加速させています。
まとめ|遠隔操作ロボットの展望
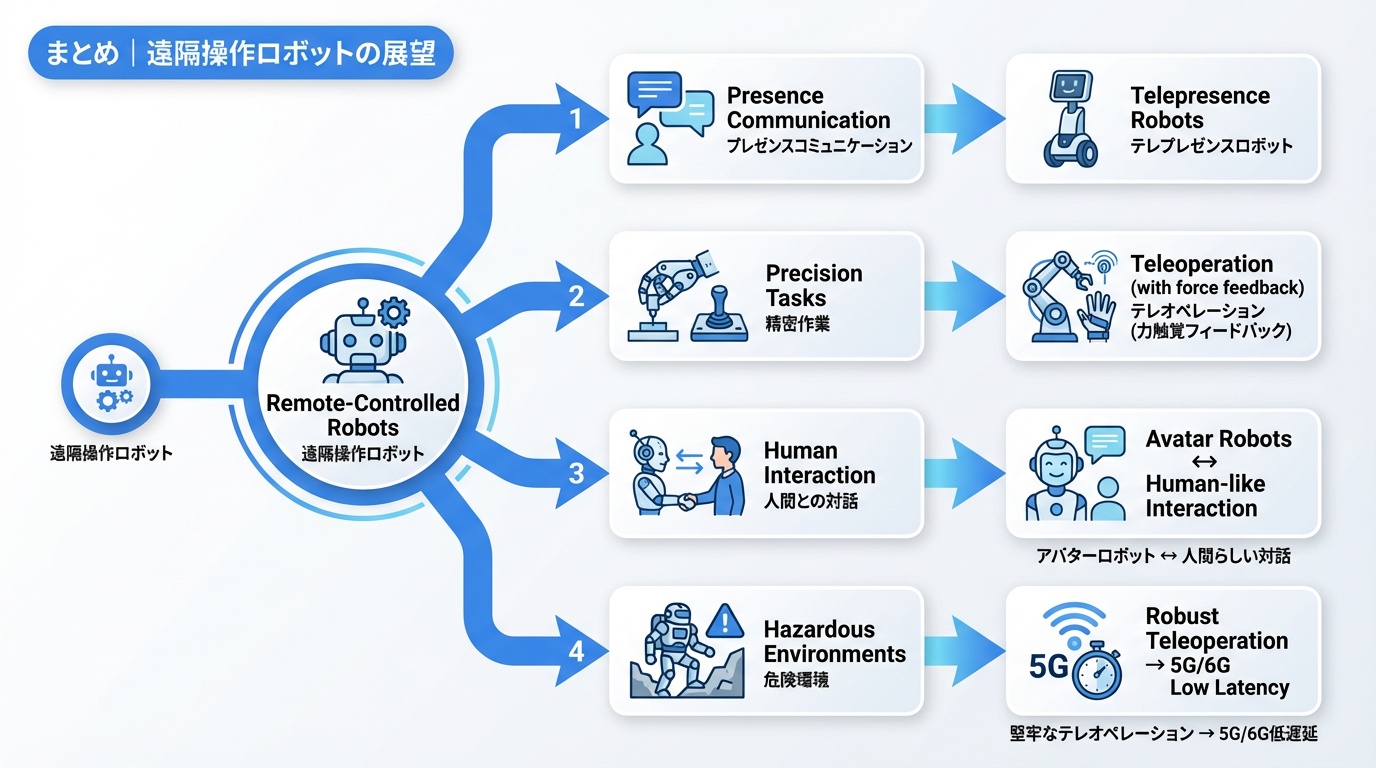
遠隔操作ロボットは、物理的距離の制約を超えて、人間の能力を拡張する技術です。
導入時の選定ポイント
- 存在感の伝達 → テレプレゼンスロボット
- 精密作業 → テレオペレーション(力覚フィードバック付き)
- 人間らしいインタラクション → アバターロボット
- 危険環境作業 → 堅牢なテレオペレーション
今後の展望
- 5G/6Gによる超低遅延化
- AI自律補助との融合
- 触覚技術の成熟
- アバター経済の確立
- 遠隔労働の標準化
関連記事としてNVIDIA GR00Tや協働ロボットの動向もご覧ください。
https://ainow.jp/humanoid-robot-guide/
https://ainow.jp/physical-ai/