
宇宙開発は2020年代に入り大きな転換期を迎えています。月面探査や火星探査の本格化、民間宇宙企業の台頭により、宇宙ロボットの重要性がこれまで以上に高まっています。本記事では、惑星探査ローバーから軌道上サービスロボット、宇宙ステーション支援ロボットまで、宇宙で活躍するロボット技術の全体像を解説します。
宇宙ロボットとは?
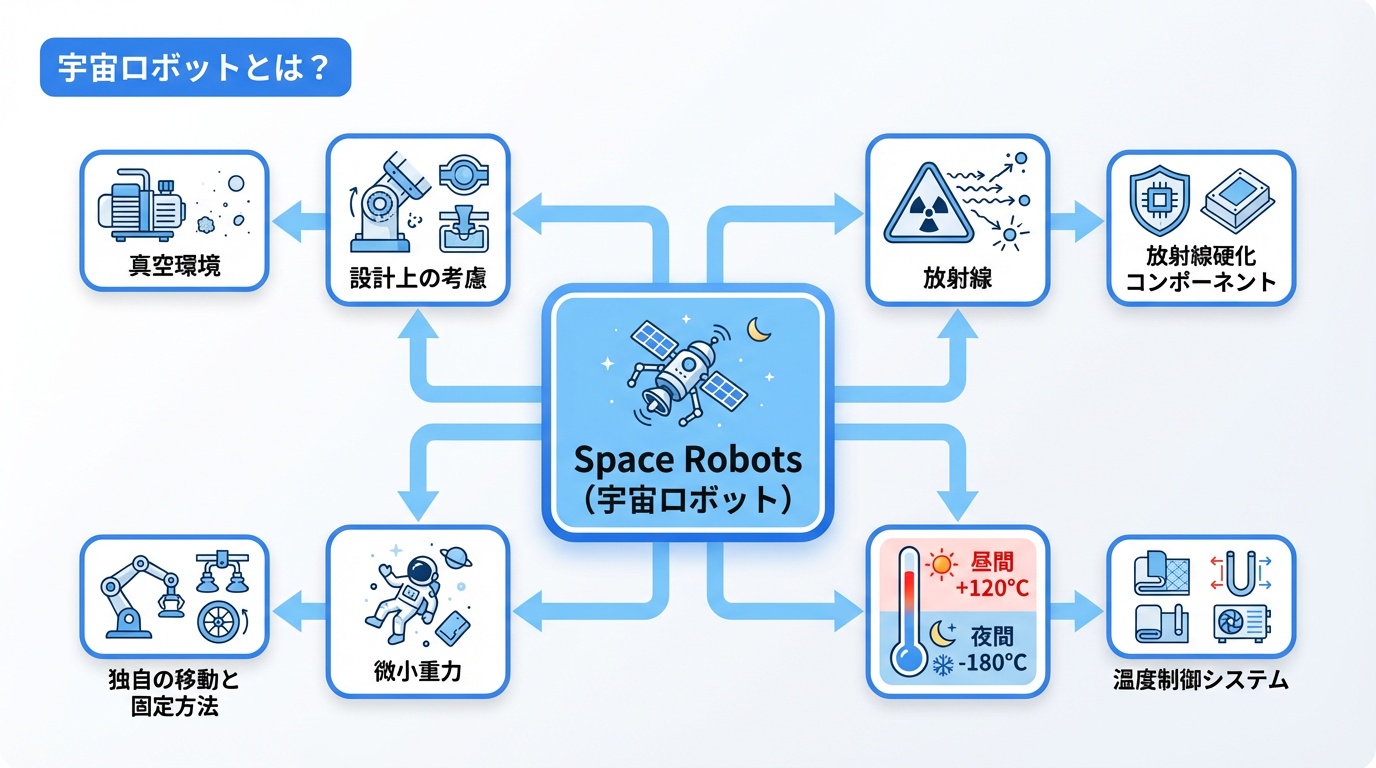
宇宙ロボットとは、宇宙空間や惑星・衛星の表面で活動する無人ロボットシステムの総称です。人間が直接到達できない環境での探査、宇宙ステーションでの作業支援、衛星の修理やデブリ除去など、多岐にわたる任務を担っています。
宇宙環境の課題
宇宙ロボットは、地上のロボットとは全く異なる過酷な環境で動作する必要があります。
- 真空環境:気圧ゼロの環境では、潤滑油の蒸発や熱伝導の制限など、機械部品の設計に特別な配慮が必要です
- 宇宙放射線:太陽フレアや銀河宇宙線による放射線は、電子機器の誤動作や劣化を引き起こします。耐放射線設計が必須となります
- 極端な温度変化:太陽光が当たる部分と影の部分で数百度の温度差が生じます。月面では昼間に約120℃、夜間に約-180℃に達することもあります
- 微小重力:軌道上では無重力に近い環境となり、固定や移動の方法が地上とは根本的に異なります
これらの課題を克服するため、宇宙ロボットには高度な耐環境設計と冗長システムが組み込まれています。
宇宙ロボットの分類
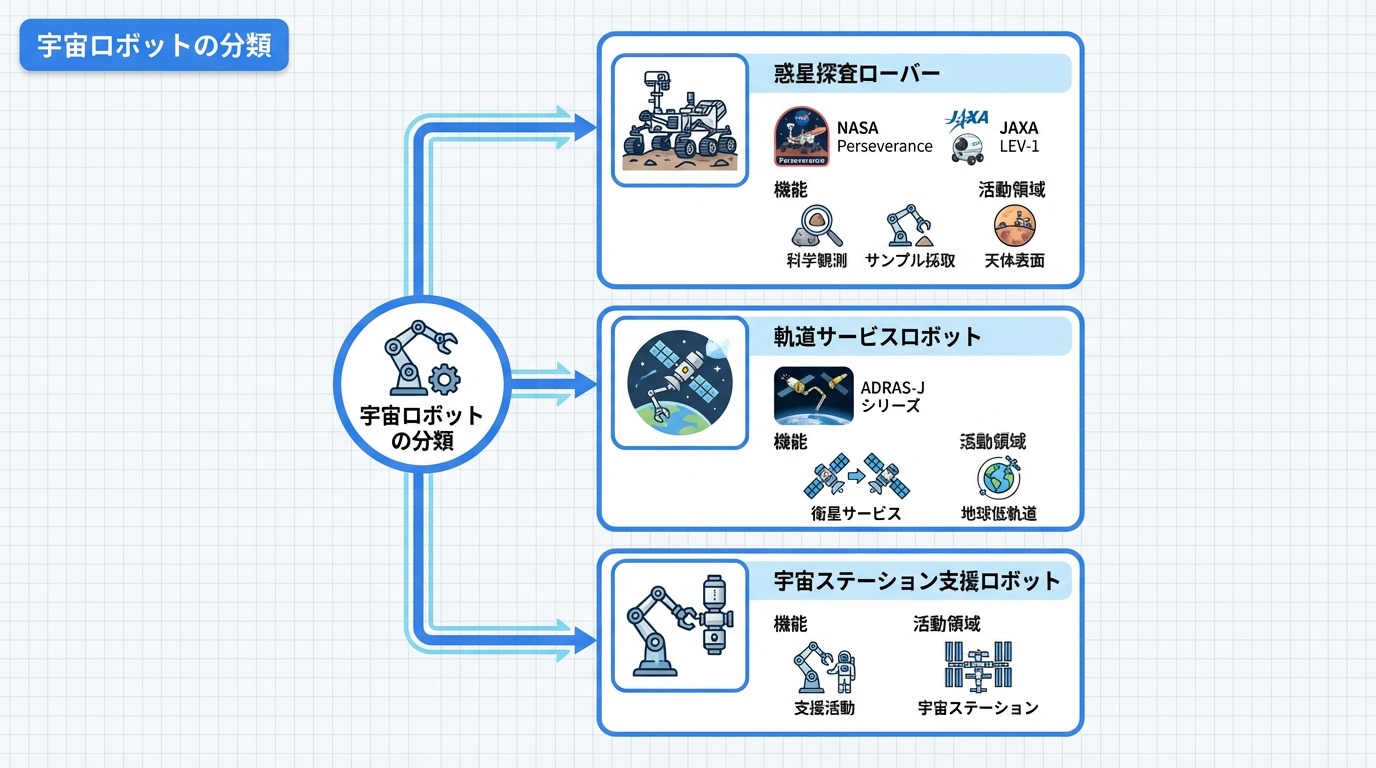
宇宙ロボットは、その活動領域と目的によって大きく3つのカテゴリーに分類できます。
1. 惑星探査ローバー
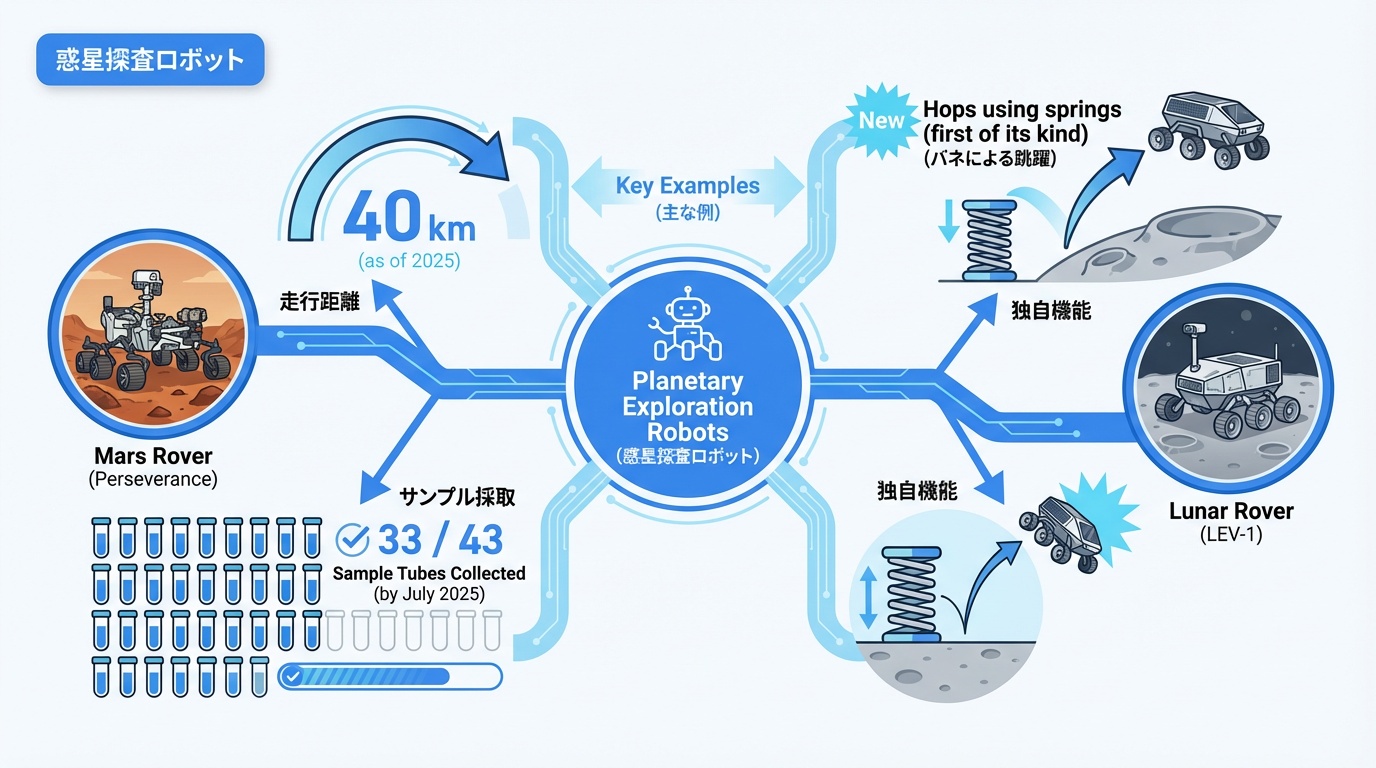
月や火星などの天体表面で移動しながら科学観測やサンプル採取を行うロボットです。代表的なものに、NASAの火星探査車「Perseverance」「Curiosity」、JAXAの月面探査機「LEV-1」「LEV-2(SORA-Q)」などがあります。
2. 軌道上サービスロボット
地球周回軌道上で衛星の修理、燃料補給、デブリ除去などを行うロボットです。アストロスケールの「ADRAS-J」シリーズやアメリカのSpaceLogisticsなどが開発を進めています。
3. 宇宙ステーション支援ロボット
国際宇宙ステーション(ISS)や中国の天宮宇宙ステーションで、宇宙飛行士の作業支援や船外活動(EVA)の補助を行うロボットです。Canadarm2やRobonaut、Int-Ball2などが該当します。
惑星探査ロボット
惑星探査ロボットは、宇宙ロボットの中でも最も歴史が長く、技術的にも成熟した分野です。
火星探査ローバー
Perseverance(パーサヴィアランス)は、2021年2月に火星のジェゼロ・クレーターに着陸したNASAの最新鋭探査車です。2026年2月には着陸5周年を迎え、約40kmの走行距離を記録しています。
Perseveranceの主な成果は以下の通りです。
- 43本のサンプルチューブのうち33本を採取完了(2025年7月時点)
- 1日あたり約400メートルという記録的な自律走行(2025年6月)
- 火星の古代生命の痕跡を示唆する「Cheyava Falls」岩石の発見
- 2031年まで運用可能との評価を取得
Curiosity(キュリオシティ)は2012年から活動を続ける先代の探査車で、火星表面での走行距離記録を保持しています。Perseveranceと共に火星探査の最前線で活躍中です。
月面探査ローバー
JAXAのSLIM(小型月着陸実証機)は2024年1月、日本初の月面軟着陸に成功しました。世界で5カ国目の快挙であり、目標地点から約10m以内という「ピンポイント着陸」を世界で初めて達成しました。
SLIMには2機の超小型ローバーが搭載されていました。
- LEV-1:質量2.1kgのホッピング式ローバー。バネを使って跳躍移動する世界初の月面ロボット
- LEV-2(SORA-Q):JAXA、タカラトミー、ソニー、同志社大学が共同開発した変形型ロボット。世界初の完全自律月面探査を達成
この成功により、日本は小型・軽量な月面探査ロボットの先進国としての地位を確立しました。
軌道上サービスロボット
軌道上サービスは、2020年代に急速に発展している宇宙ロボットの新分野です。増加する宇宙ゴミ(デブリ)問題や衛星の長寿命化ニーズに対応するため、各国の企業・機関が技術開発を競っています。
軌道上サービスの4つの領域
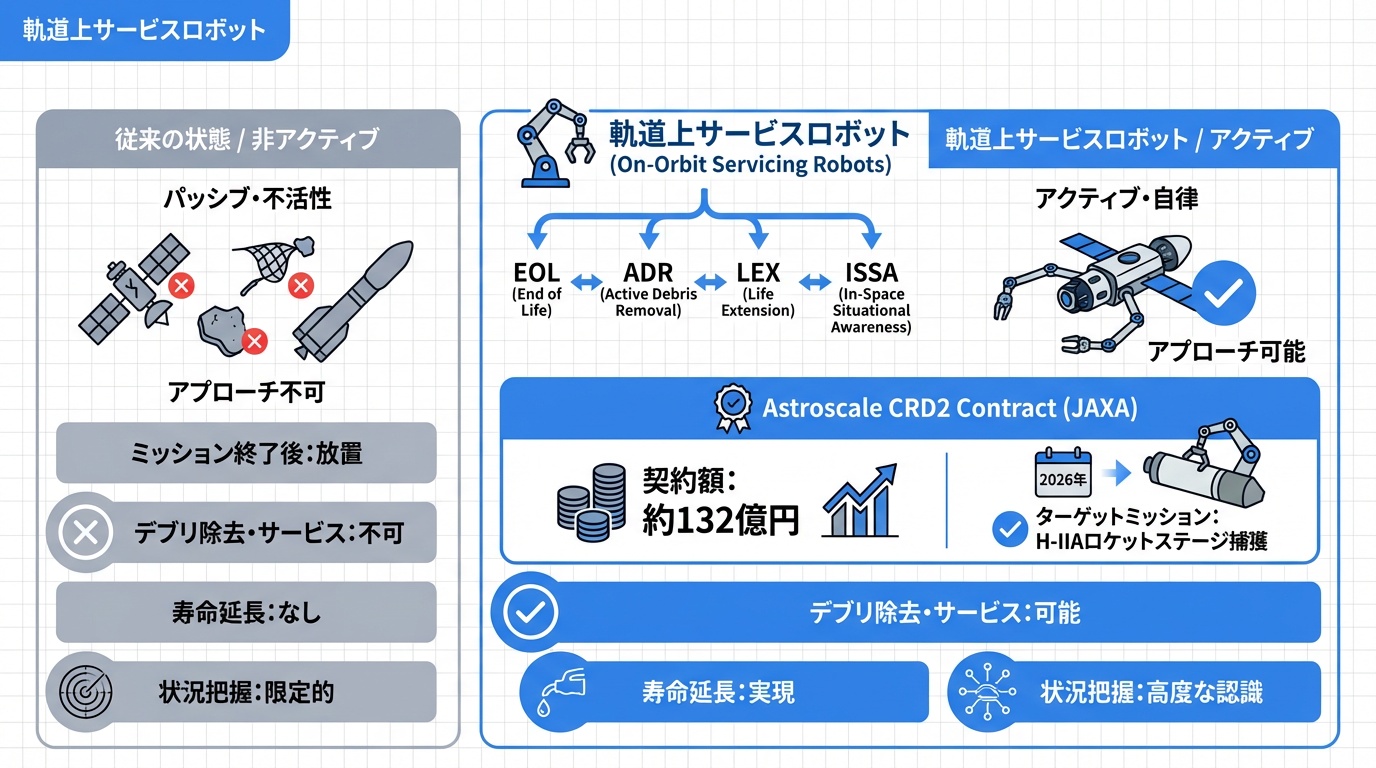
日本のアストロスケールは、軌道上サービスを以下の4領域に分類しています。
- EOL(End of Life):衛星運用終了時のデブリ化防止除去
- ADR(Active Debris Removal):既存デブリの能動的除去
- LEX(Life Extension):衛星の寿命延長サービス
- ISSA(In-Situ Space Situational Awareness):故障機・物体の観測・点検
アストロスケールの取り組み
アストロスケールは2024年8月、JAXAと約132億円の「商業デブリ除去実証(CRD2)フェーズII」契約を締結しました。2026年度以降に打ち上げ予定のADRAS-J2では、2009年に打ち上げられたH-IIAロケット上段(全長約11m、重量約3トン)の捕獲・除去を目指します。成功すれば、民間企業として世界初の大型デブリ除去となります。
また、2025年5月にはホンダ技術研究所と衛星への燃料補給用「給油口接続システム」の共同開発を発表するなど、多角的な事業展開を進めています。
衛星修理と燃料補給
衛星の多くは燃料切れで運用終了となります。軌道上での燃料補給や修理が実現すれば、衛星の運用寿命を大幅に延ばすことが可能です。アメリカのSpaceLogisticsは既にRPO(ランデブー・近傍運用)技術を宇宙で実証しており、アストロスケールと並んで世界をリードしています。
宇宙ステーションロボット
宇宙ステーションでは、様々なロボットが宇宙飛行士の活動を支援しています。
国際宇宙ステーション(ISS)のロボット
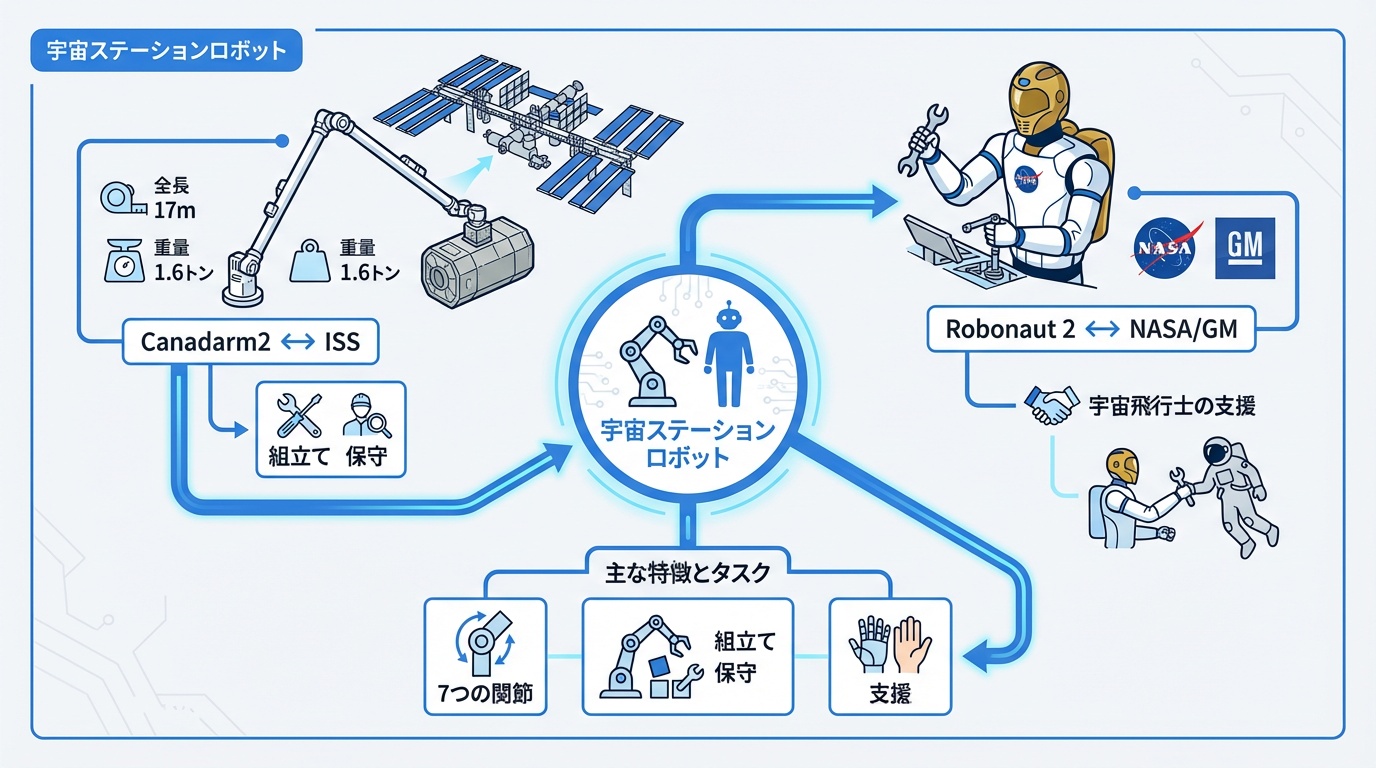
Canadarm2(カナダアーム2)は、2001年から運用されているISSの主力ロボットアームです。全長17m、質量約1.6トン、7つの関節を持ち、以下の任務を担っています。
- 新モジュールの組み立て・設置
- 無人補給船(HTVこうのとり等)のキャプチャー
- 宇宙飛行士の船外活動支援
- 外部機器のメンテナンス
Robonaut 2(ロボノート2)は、NASAとGMが共同開発した人型ロボットで、2011年に宇宙に送られました。人間と同じ工具を使用でき、スイッチ操作や物体の把持が可能です。2018年に修理のため地球に帰還し、改良後の再打ち上げが検討されています。
Astrobeeは、ISS内を自由に飛行する小型ロボットシステムです。「Honey」「Queen」「Bumble」の3機があり、在庫管理、実験の記録、貨物輸送などを自律的または遠隔操作で行います。
日本のJAXAが開発したInt-Ball2も、宇宙飛行士に代わって船内を撮影し、地上にリアルタイムで映像を送信する機能を持っています。
中国・天宮宇宙ステーションのロボット
中国の天宮宇宙ステーションには、複数のロボットシステムが搭載されています。
メインロボットアームは天和コアモジュールに搭載された全長10m、可搬質量25トンの大型アームです。問天実験モジュールには全長5m、可搬質量3トンの小型アームがあり、両者を連結して全長15mのアームとして運用することも可能です。
2025年5月には、新設された自動足部拘束具アダプターにより、船外活動時間が約40分短縮されました。また、小航(Xiao Hang)というスマートロボットが宇宙飛行士を支援しており、将来的には船内点検やリソース管理機能の追加が予定されています。
日本の宇宙ロボット開発
日本は宇宙ロボット分野で世界をリードする技術力を持っています。
JAXAの取り組み
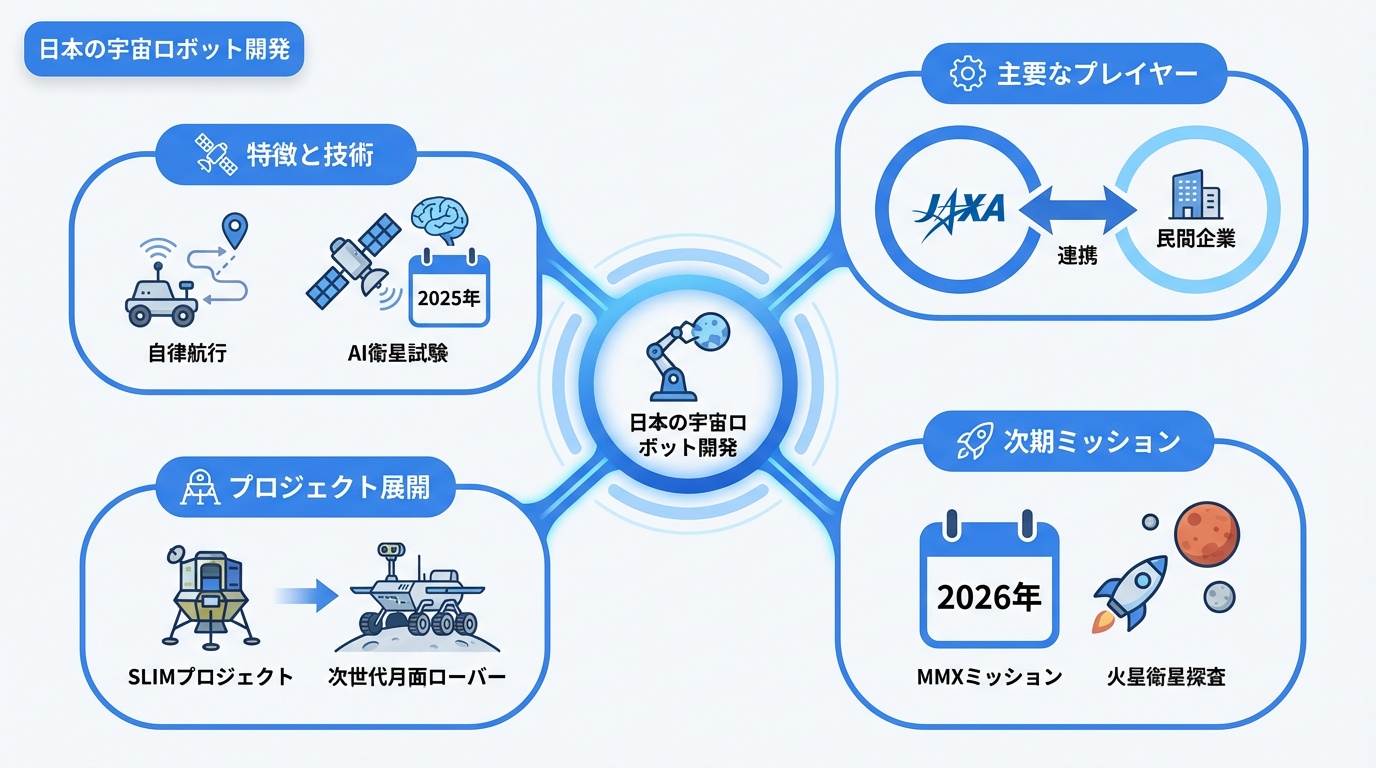
JAXAは、SLIMプロジェクトで得た知見を活かし、次世代の月面探査ロボット開発を進めています。2026年度には火星衛星探査計画(MMX)の探査機打ち上げが予定されており、火星の衛星フォボスからのサンプルリターンを目指します。
また、JAXAは探査ローバーの自律機能、地形地図作成、経路計画、障害物回避などの研究を継続しており、2025年度にはAIを搭載した衛星の軌道上実証実験も計画されています。
民間企業の活躍
ispaceは、民間月面探査プログラム「HAKUTO-R」を推進してきました。2023年と2025年に2回の月ミッションを実施し、深宇宙航行における姿勢制御・誘導制御技術を実証しました。2026年にはアメリカ法人主導のミッション3、2028年には日本で開発中のシリーズ3ランダーを用いたミッション4が予定されています。
アストロスケールは前述の通り、軌道上サービス分野で世界トップクラスの実績を持ちます。2026年〜2027年頃の本格サービス開始を目指しており、エアバスとの協業も進めています。
ダイモンは超小型月面探査車「YAOKI」を開発しており、アメリカIntuitive Machines社のIM-2ミッションに搭載される予定です。
遠隔操作と自律制御
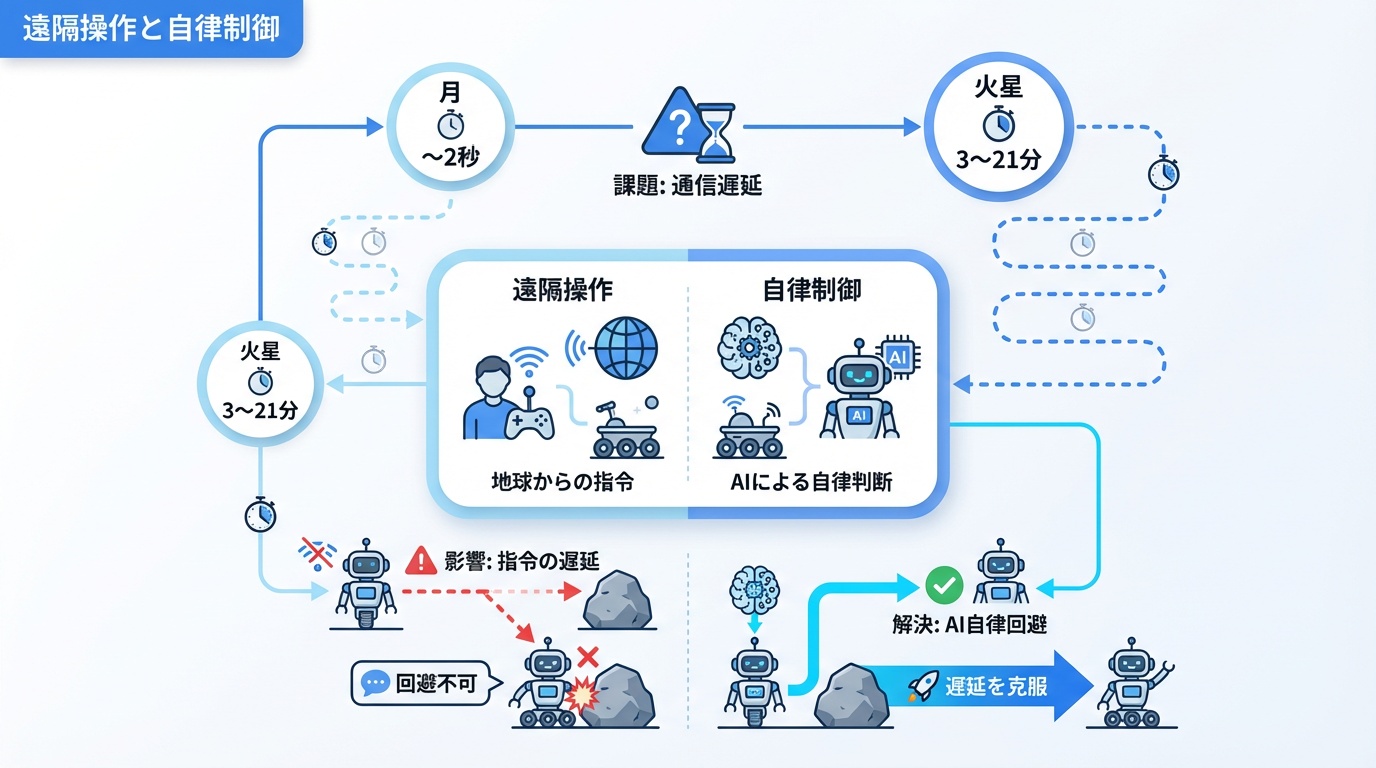
宇宙ロボットの制御において、最大の課題は通信遅延です。
通信遅延の問題
電波は光速で進みますが、宇宙の距離では無視できない遅延が発生します。
- 月:地球との往復通信に約2秒
- 火星:3分〜21分(地球との位置関係による)
- 木星以遠:数十分〜数時間
火星探査車を地球からリアルタイムで操縦することは物理的に不可能です。数分〜数十分の遅延があるため、障害物を発見してから回避指令を送っても間に合いません。
AIによる自律化の進展
この課題を解決するため、宇宙ロボットには高度な自律制御機能が搭載されています。Perseveranceは90%以上の走行を自律的に行っており、AIが自動で障害物を検知・回避しながら効率的なルートを選択します。
NASAやJAXA、ESAなどの宇宙機関は、探査機が自律的に判断し、機体同士が「相談」しながらミッションを再構築できるAI技術の実装に取り組んでいます。これは「チーム探査」と呼ばれる新しいアプローチで、突発的な砂嵐や機器トラブルなどの予測不能な状況に対応するために重要です。
日本でも、JAXAが衛星自身による観測計画の立案や他衛星との連携を自律的に行う技術の開発を進めており、2025年度に軌道上実証が予定されています。
最新動向(2026年)

2026年は宇宙ロボット分野で多くの重要なマイルストーンが予定されています。
アルテミス計画の進展
NASAのArtemis IIミッションは2026年2月7日の打ち上げが予定されており、有人での月周回飛行を実施します。Artemis IIIでは2027年中頃に有人月面着陸が計画されています。
月面での活動を支援するため、Lunar Terrain Vehicle(LTV)の開発も進んでいます。Lunar Outpost社が主導する「Eagle」は、20kmの活動範囲、最高時速15km、月の夜を越える耐久性を備えています。同社は2025年12月にArtemis IVへの参加が決定し、民間ローバーとして初めてNASAの有人月探査プログラムに組み込まれました。
商業宇宙開発の加速
民間による月面ミッションも活発化しています。
- Intuitive Machines IM-2:月の南極シャクルトン・クレーターを目指し、日本のYAOKIなど複数のローバーを展開予定
- Firefly Aerospace Blue Ghost M2:2026年後半に月裏側への着陸を試みる
- Astrobotic Griffin-II:CLPSプログラムの一環として2026年に打ち上げ予定
国際的な月探査競争
中国は2026年8月に嫦娥7号の打ち上げを予定しており、「月の水」発見を主要目標としています。また、天問三号による世界初の火星サンプルリターンも計画されています。
日本のJAXAは2026年度にMMX(火星衛星探査計画)探査機を打ち上げ、火星衛星フォボスからのサンプル採取と2031年の地球帰還を目指します。
まとめ|宇宙ロボット技術の展望
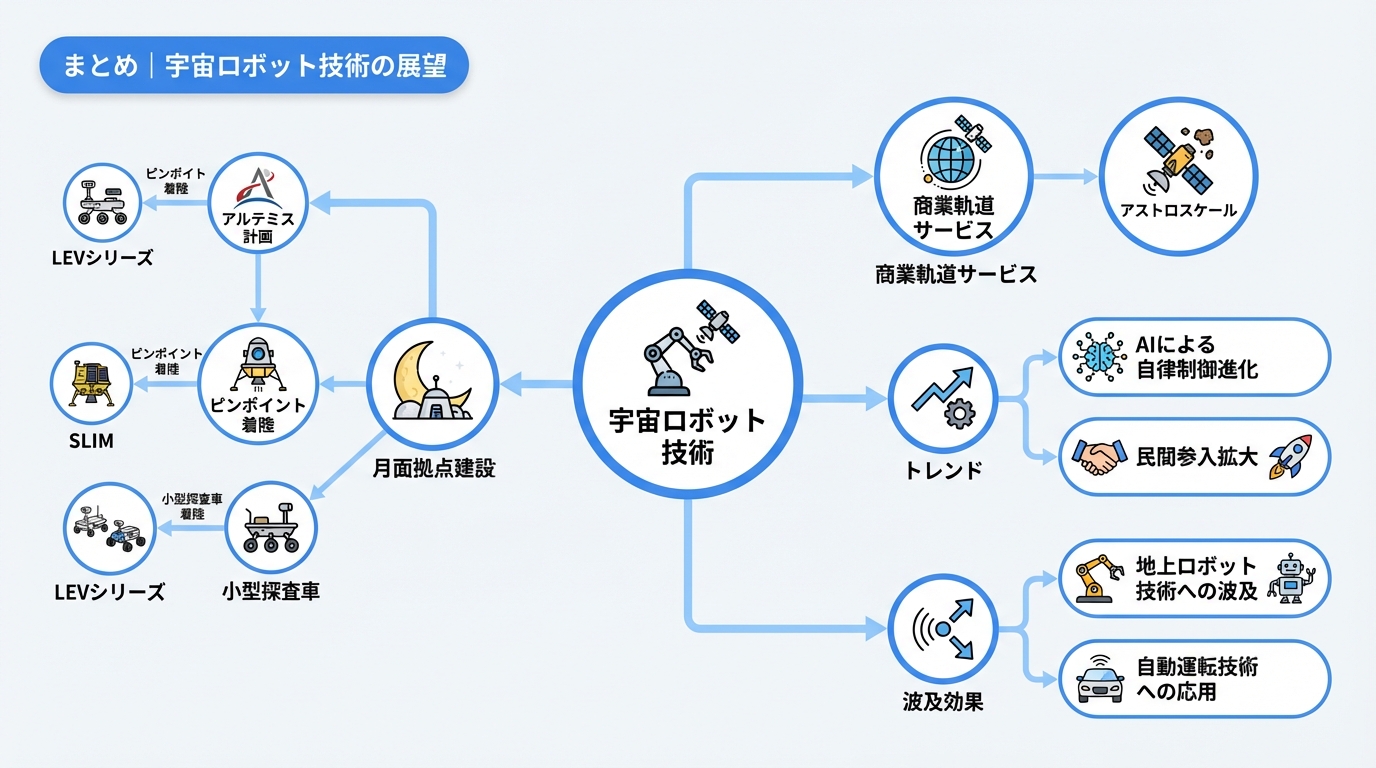
宇宙ロボットは、人類の宇宙活動を支える不可欠な技術として、今後さらに重要性を増していきます。
2020年代後半の展望
- 月面基地建設:アルテミス計画による有人月面活動の本格化に伴い、建設ロボットや資源採掘ロボットの需要が高まります
- 軌道上サービスの商業化:デブリ除去や衛星修理が本格的なビジネスとして確立される見込みです
- AIの高度化:通信遅延を克服する自律制御技術がさらに進化し、より複雑なミッションが可能になります
- 民間参入の拡大:宇宙ロボット分野への民間企業の参入が加速し、コスト低下と技術革新が促進されます
日本の強み
日本は、SLIMでの精密着陸技術、LEVシリーズの小型軽量ローバー、アストロスケールの軌道上サービスなど、独自の強みを持っています。これらの技術を活かし、国際的な宇宙探査プロジェクトにおいて重要な役割を果たすことが期待されています。
宇宙ロボット技術の発展は、単に宇宙開発だけでなく、地上の産業用ロボットや自動運転技術にもフィードバックされます。過酷な宇宙環境で培われた技術が、私たちの日常生活にも恩恵をもたらす日も遠くありません。
 GitHub Copilot
GitHub Copilot Replit Agent
Replit Agent Cline
Cline Dify
Dify Jinbaflow
Jinbaflow