
ロボットマニピュレーションは、ロボットが物体を把持・操作・組立する技術です。倉庫ピッキング、製造組立、家庭用ロボットなど、あらゆる分野で必要とされる基盤技術です。本記事では、マニピュレーションの基礎から最新のAI技術まで徹底解説します。
マニピュレーションとは?基本概念
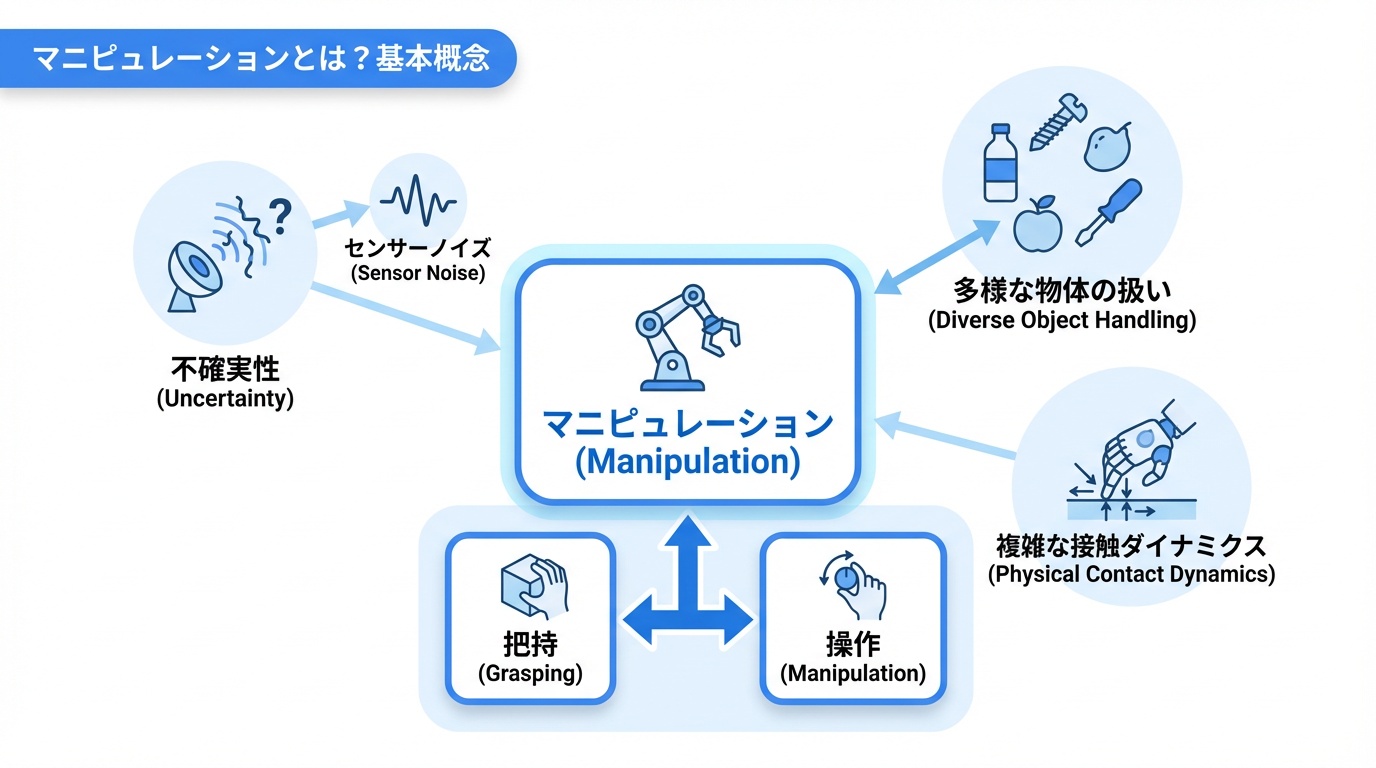
マニピュレーション(Manipulation)は、ロボットが環境内の物体を意図的に動かす能力を指します。「把持(Grasping)」と「操作(Manipulation)」の2つの要素から構成されます。
マニピュレーションの基本要素
| 要素 | 説明 | 技術課題 |
|---|---|---|
| 認識 | 物体の位置・姿勢・形状を把握 | オクルージョン、未知物体 |
| 計画 | 把持点・経路を決定 | 衝突回避、最適化 |
| 把持 | 物体を安定して保持 | 滑り防止、力制御 |
| 操作 | 物体を目的位置・姿勢に移動 | 精度、速度 |
| 配置 | 物体を安定して配置 | 挿入、嵌合 |
マニピュレーションの難しさ
- 多様性:無数の物体形状・材質・重量に対応
- 不確実性:センサーノイズ、物体位置の誤差
- 接触:物理的な接触を伴う複雑な力学
- リアルタイム性:高速な認識・制御が必要
倉庫ロボットでは多様な商品のピッキングにマニピュレーション技術が不可欠です。
エンドエフェクタの種類と選定
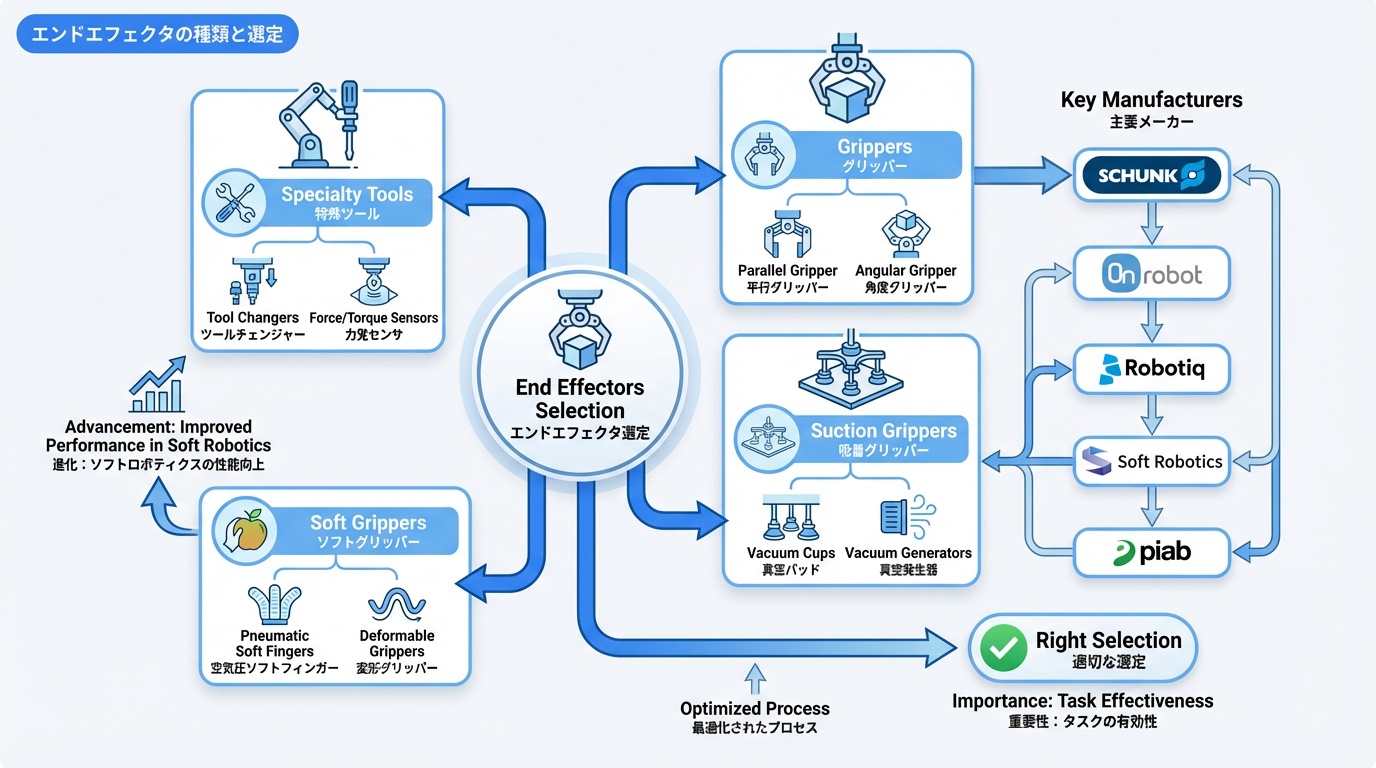
エンドエフェクタ(End Effector)は、ロボットアームの先端に取り付ける作業ツールです。用途に応じて適切な選定が重要です。
グリッパーの主な種類
| 種類 | 原理 | 特徴 | 適した対象 |
|---|---|---|---|
| 平行グリッパー | 2指で挟む | シンプル、高精度 | 角形、円筒形 |
| 3指グリッパー | 3点で包み込む | 安定把持、適応性 | 球形、不規則形状 |
| 吸着グリッパー | 真空吸着 | 表面接触、高速 | 平面、段ボール |
| 磁気グリッパー | 電磁石 | 非接触、高速 | 磁性金属 |
| ソフトグリッパー | 柔軟素材 | 適応性、安全性 | 繊細な物、食品 |
吸着グリッパーの詳細
| 方式 | 原理 | 特徴 |
|---|---|---|
| 真空パッド | 負圧で吸着 | 低コスト、汎用 |
| ベルヌーイ | 気流で非接触吸着 | 傷つけない、多孔質対応 |
| ゲッコー(ヤモリ) | 微細構造接着 | 残留物なし、宇宙利用 |
主要グリッパーメーカー
- SCHUNK:ドイツ、産業用の定番
- OnRobot:デンマーク、協働ロボット向け
- Robotiq:カナダ、適応型グリッパー
- Soft Robotics:米国、ソフトグリッパー
- Piab:スウェーデン、吸着ソリューション
ソフトロボティクスの進歩により、柔らかいグリッパーの性能が向上しています。
把持計画:どこを掴むか
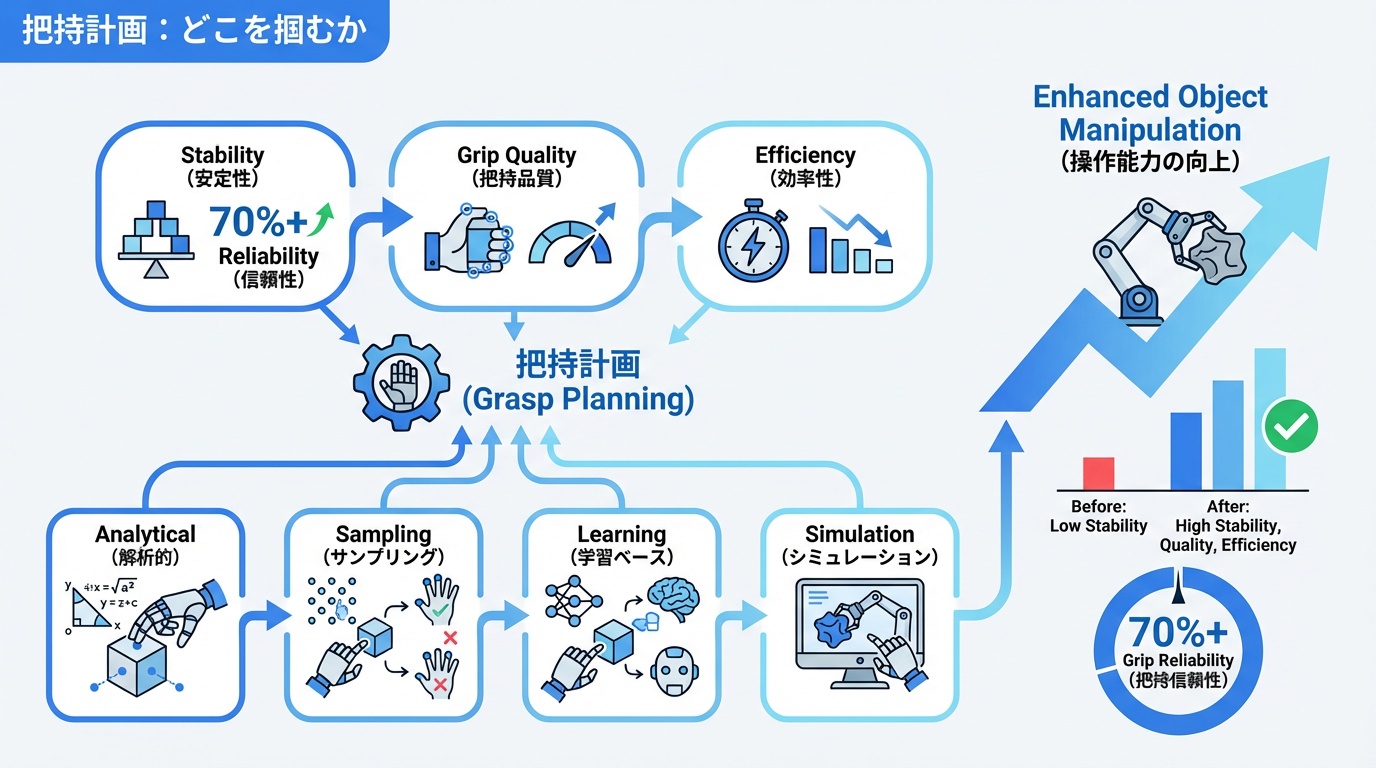
把持計画(Grasp Planning)は、物体のどこをどのように掴むかを決定するプロセスです。安定した把持のために重要な技術です。
把持品質の評価指標
| 指標 | 説明 | 計算方法 |
|---|---|---|
| Force Closure | 任意方向の力に抵抗可能 | 接触点の配置解析 |
| Form Closure | 幾何学的に拘束 | 接触形状解析 |
| 安定余裕 | 外乱への耐性 | 固有値解析 |
| 操作性 | 把持後の操作しやすさ | マニピュラビリティ |
把持計画の手法
- 解析的手法:幾何学的に把持点を計算
- サンプリングベース:多数の候補から最適を選択
- 学習ベース:データから把持を学習
- シミュレーションベース:物理シミュレーションで検証
代表的な把持検出手法
| 手法 | 入力 | 特徴 |
|---|---|---|
| GraspNet | 点群 | 6-DoF把持、大規模データセット |
| Dex-Net | 深度画像 | 解析的品質指標、高速 |
| Contact-GraspNet | 点群 | 接触ベース、雑然環境対応 |
| AnyGrasp | 点群 | リアルタイム、高成功率 |
運動計画:衝突を避けて動く

運動計画(Motion Planning)は、ロボットが障害物を避けながら目的位置まで移動する経路を計算する技術です。
運動計画の主要アルゴリズム
| アルゴリズム | カテゴリ | 特徴 |
|---|---|---|
| RRT(Rapidly-exploring Random Tree) | サンプリング | 高次元対応、確率的完全性 |
| RRT* | サンプリング | RRT + 最適性 |
| PRM(Probabilistic Roadmap) | サンプリング | 事前計算、複数クエリ |
| CHOMP | 最適化 | 軌道最適化、滑らかな経路 |
| STOMP | 最適化 | 確率的最適化、並列計算 |
MoveIt!:ROS標準の運動計画
MoveIt!は、ROSで最も広く使われる運動計画フレームワークです。
- OMPL統合(RRT, PRMなど)
- 衝突検出(FCL)
- 逆運動学ソルバー
- 把持計画統合
- 可視化ツール
ROS入門でMoveIt!の使い方を学べます。
力制御:柔軟な接触操作
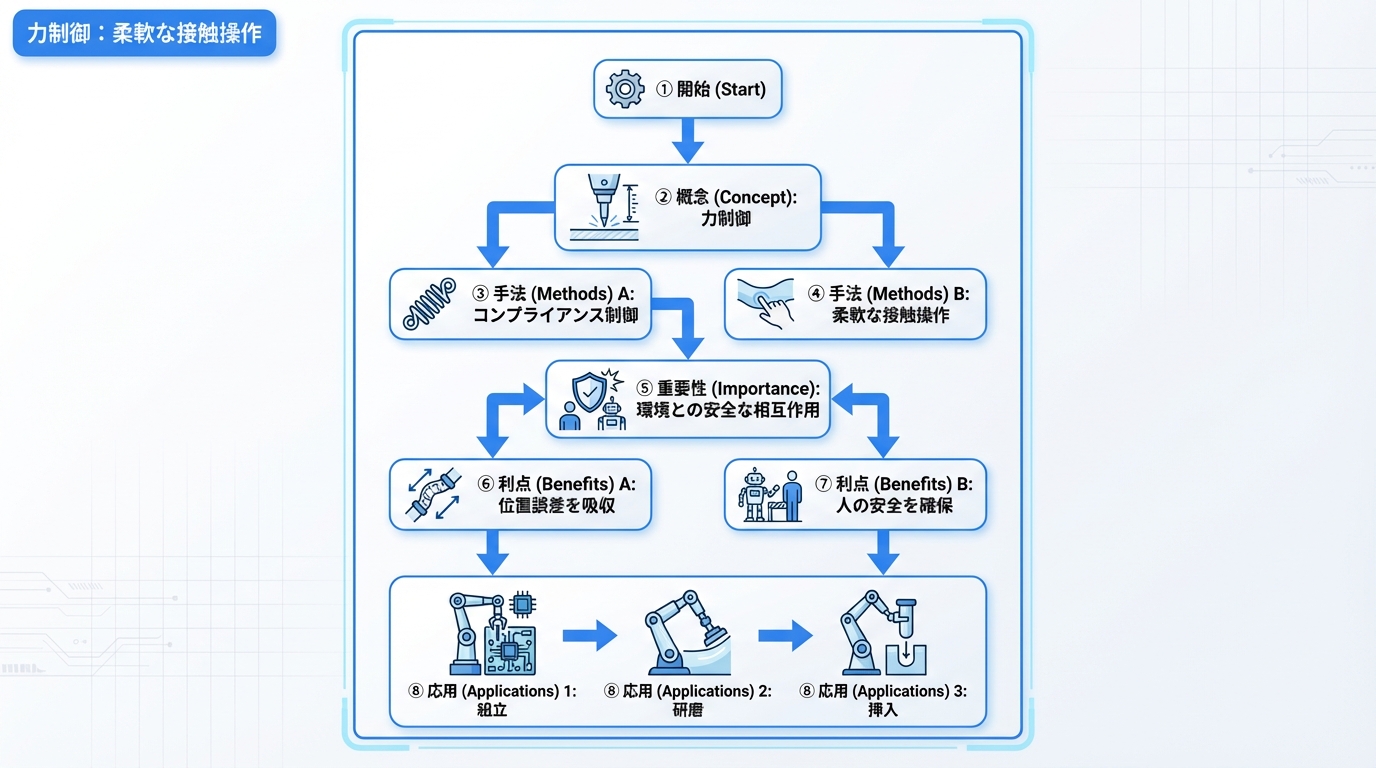
力制御は、ロボットが環境と接触しながら作業する際に、力とトルクを適切に制御する技術です。組立、研磨、挿入などに必須です。
力制御の主な方式
| 方式 | 原理 | 特徴 | 用途 |
|---|---|---|---|
| インピーダンス制御 | 仮想バネダンパ | 柔軟な接触、安定 | 組立、研磨 |
| アドミタンス制御 | 力入力→位置出力 | 力センサー必須 | 人間協調 |
| ハイブリッド制御 | 位置/力を軸ごと切替 | 高精度挿入 | 嵌合、挿入 |
| 力追従制御 | 目標力を維持 | 一定押付け | 研磨、面倣い |
コンプライアンス制御の重要性
硬いロボットと硬い環境が接触すると、小さな位置誤差が大きな力を生みます。コンプライアンス(柔軟性)を導入することで:
- 環境との安全な接触
- 位置誤差の吸収
- 人間との安全な協働
- 繊細な物体の取り扱い
協働ロボットでは力制御による安全性確保が標準です。
学習ベースマニピュレーション
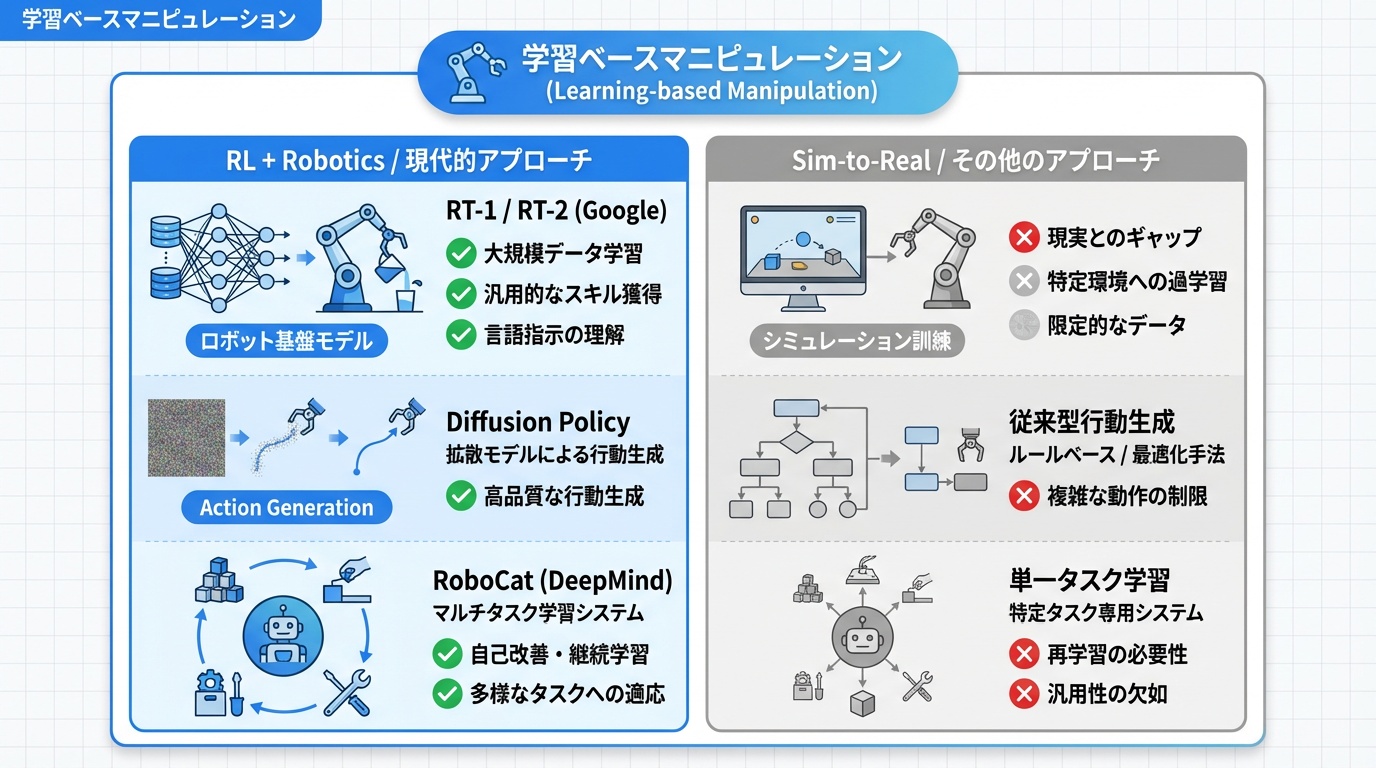
近年、機械学習・深層学習を活用したマニピュレーション手法が急速に発展しています。
学習アプローチの比較
| アプローチ | データソース | 特徴 | 課題 |
|---|---|---|---|
| 模倣学習 | 人間のデモ | 直感的、効率的 | デモ収集コスト |
| 強化学習 | 試行錯誤 | 最適方策発見 | サンプル効率 |
| 自己教師あり | 自動生成 | 大規模学習 | 報酬設計 |
| Sim-to-Real | シミュレーション | 安全、大量データ | Reality Gap |
注目の研究・システム
- RT-1/RT-2(Google):ロボット基盤モデル
- Diffusion Policy:拡散モデルで行動生成
- ACT:Action Chunking with Transformers
- RoboCat(DeepMind):マルチタスク学習
強化学習×ロボットでSim-to-Realの詳細を解説しています。
マニピュレーションの応用分野
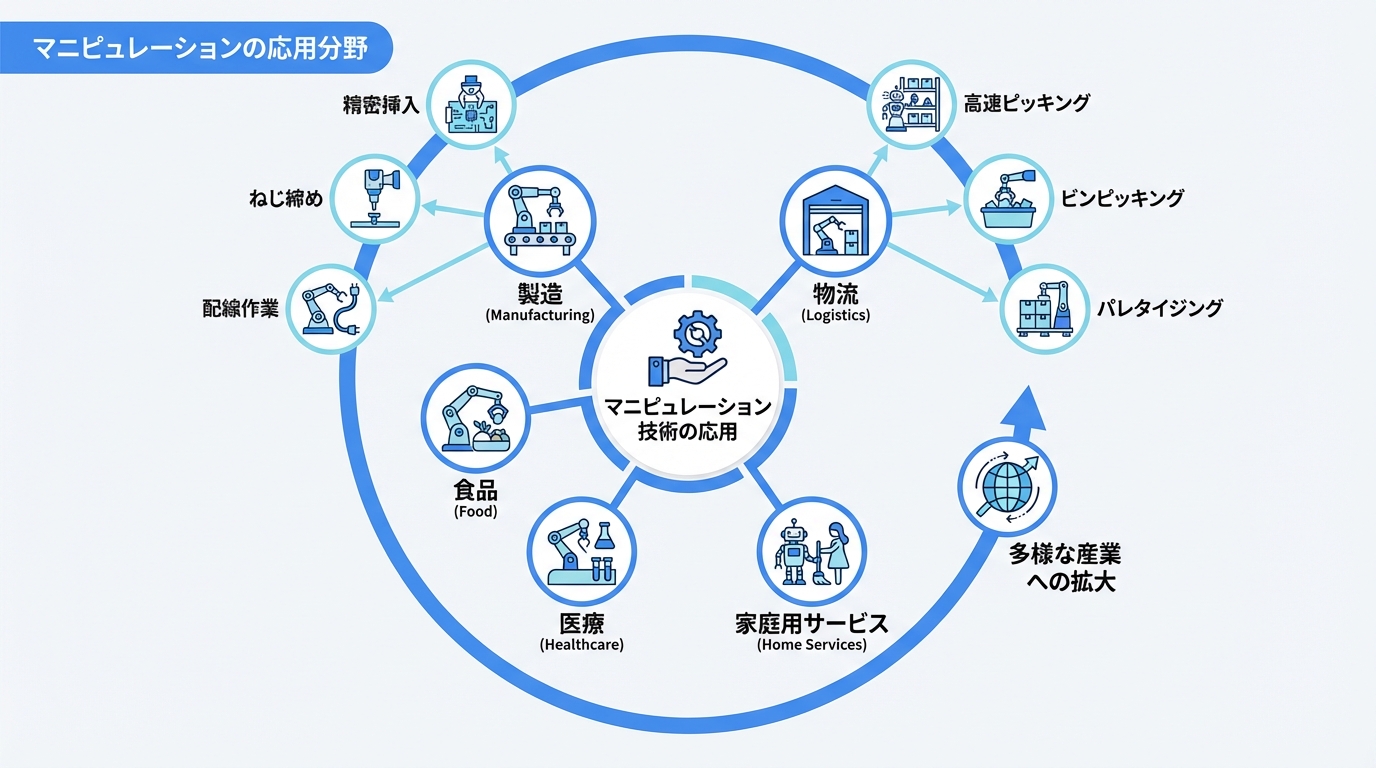
マニピュレーション技術は様々な分野で実用化されています。
1. 物流・倉庫ピッキング
- 多様な商品の高速ピッキング
- バラ積みピッキング(Bin Picking)
- パレタイジング/デパレタイジング
2. 製造・組立
- 精密部品の挿入・嵌合
- ねじ締め・配線
- 検査・測定
3. 食品・農業
- 果物・野菜の収穫
- 食品盛り付け
- 弁当箱詰め
4. 医療・ライフサイエンス
- 手術支援(細かい操作)
- 検体ハンドリング
- 創薬自動化
5. 家庭・サービス
- 家事支援(片付け、洗濯)
- 調理補助
- 介護支援
デクストラスマニピュレーション

デクストラス(Dexterous)マニピュレーションは、人間の手のように器用に物体を操作する技術です。多指ハンドを用いて高度な操作を実現します。
多指ハンドの種類
| 製品 | 指数 | 自由度 | 特徴 |
|---|---|---|---|
| Shadow Hand | 5指 | 24 DoF | 人間に最も近い、研究用 |
| Allegro Hand | 4指 | 16 DoF | 低コスト、研究用 |
| LEAP Hand | 4指 | 16 DoF | 低コスト、オープンソース |
| Ability Hand | 5指 | 6 DoF | 義手、筋電制御 |
デクストラス操作の技術課題
- In-hand manipulation:手の中で物体を回転・移動
- Tool use:道具を使った作業
- Bi-manual:両手協調操作
- 触覚フィードバック:繊細な力制御
ヒューマノイドロボットでは人間のような器用さが求められます。
まとめ|マニピュレーション技術の展望
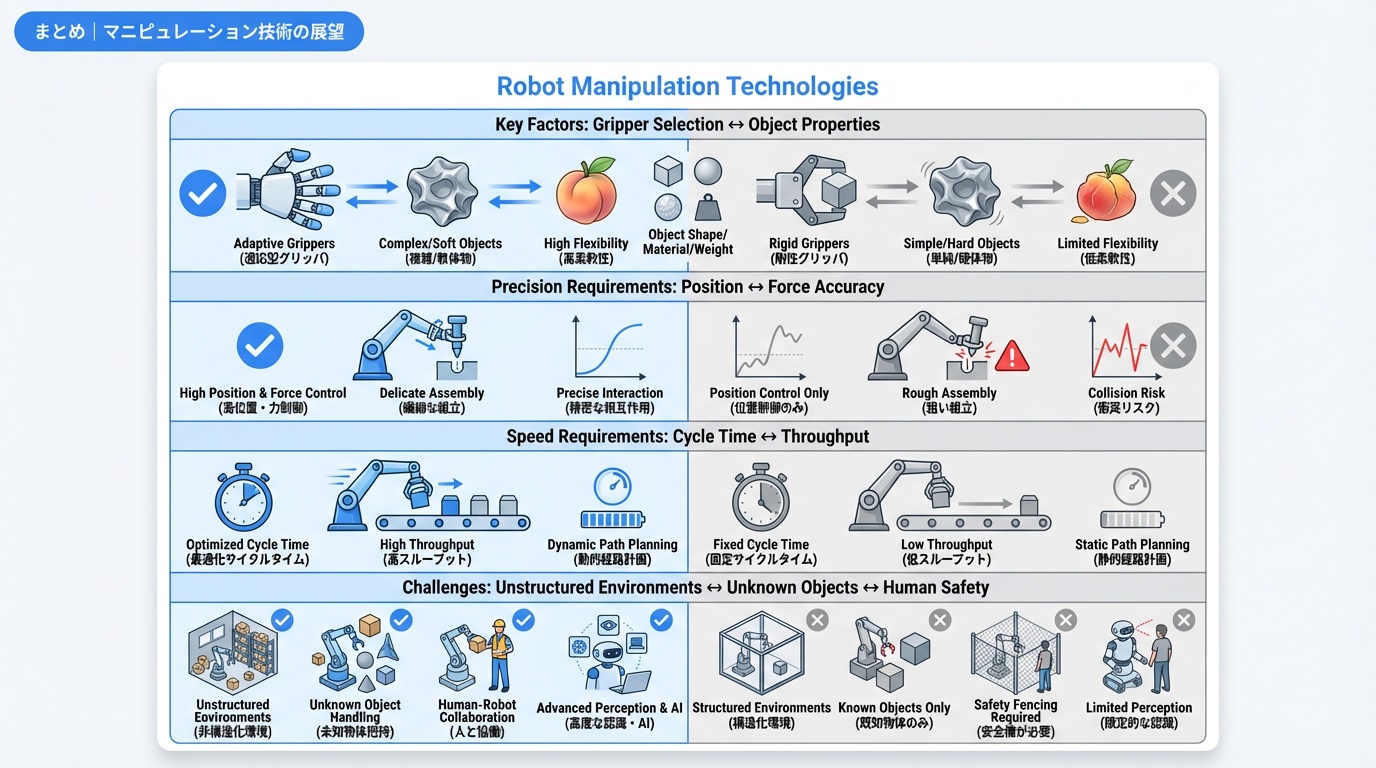
ロボットマニピュレーションは、AIとハードウェアの進歩により急速に発展しています。
技術選定のポイント
- 対象物:形状・材質・重量に合ったグリッパー選定
- 精度要件:位置精度、力精度の要求
- 速度要件:サイクルタイム、スループット
- 環境:雑然環境、未知物体への対応
- 安全性:人間との協働、力制限
今後の展望
- 基盤モデルによる汎用マニピュレーション
- 触覚センサーの高度化
- デクストラスハンドの低コスト化
- 家庭用ロボットへの展開
関連記事としてフィジカルAIの動向もご覧ください。
https://ainow.jp/cobots/
https://ainow.jp/warehouse-robot/

https://ainow.jp/picking-robot-guide/