
ロボットセンサーは、ロボットが環境を認識し、適切に動作するための「感覚器官」です。自動運転、産業用ロボット、サービスロボットなど、あらゆるロボットシステムの性能を左右する重要技術です。本記事では、主要なセンサー技術の原理、特徴、選定ポイントまで徹底解説します。
ロボットセンサーとは?基本概念と分類
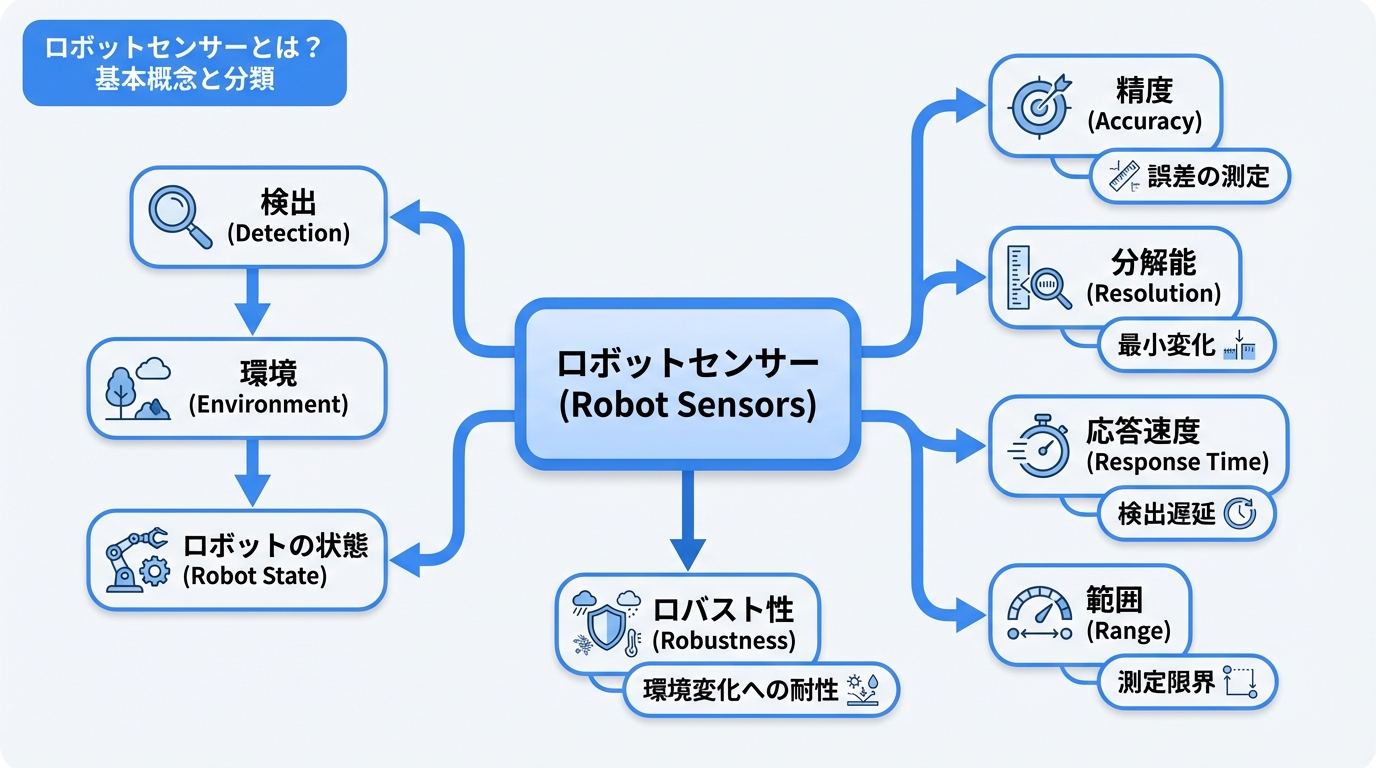
ロボットセンサーは、ロボットが周囲の環境や自身の状態を検知するためのデバイスです。人間の五感に相当する機能をロボットに与えます。
センサーの基本分類
| 分類 | 対応する人間の感覚 | 代表的なセンサー |
|---|---|---|
| 外界センサー | 視覚・聴覚 | カメラ、LiDAR、超音波 |
| 内界センサー | 固有感覚 | エンコーダ、IMU、ジャイロ |
| 接触センサー | 触覚 | 触覚センサー、力覚センサー |
| 近接センサー | 空間認識 | 赤外線、超音波、静電容量 |
センサー選定の基本指標
- 精度:測定値と真値の差(誤差)
- 分解能:検出可能な最小変化量
- 応答速度:変化を検出するまでの時間
- レンジ:測定可能な範囲
- 堅牢性:環境変化への耐性
SLAM技術ではこれらのセンサーを組み合わせて自己位置推定と地図作成を行います。
視覚センサー:カメラ技術
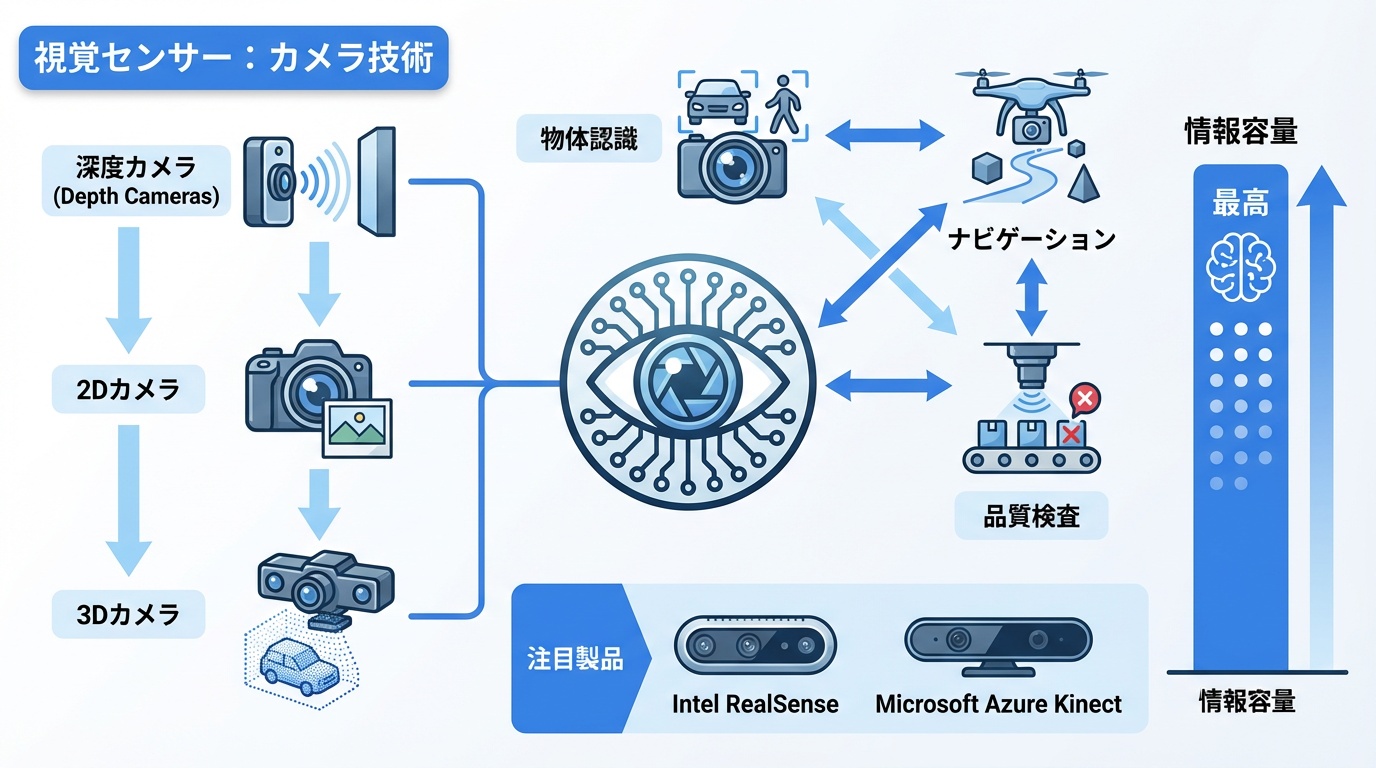
カメラは最も情報量が多いセンサーで、物体認識、ナビゲーション、品質検査など幅広く使われます。
カメラの種類と特徴
| 種類 | 原理 | 特徴 | 用途 |
|---|---|---|---|
| 単眼カメラ | 2D画像取得 | 低コスト、軽量 | 物体認識、追跡 |
| ステレオカメラ | 視差から深度推定 | 3D情報取得可能 | 距離測定、障害物検知 |
| 深度カメラ(RGB-D) | ToF/構造化光 | 直接深度取得 | 屋内ナビゲーション |
| イベントカメラ | 輝度変化検出 | 超高速、低遅延 | 高速追跡、ドローン |
| サーマルカメラ | 赤外線検出 | 暗所・煙中可視 | 監視、点検 |
代表的な深度カメラ製品
| 製品 | メーカー | 方式 | 特徴 |
|---|---|---|---|
| RealSense D435 | Intel | ステレオ+IR | 汎用、低コスト |
| Azure Kinect | Microsoft | ToF | 高精度、SDK充実 |
| ZED 2 | Stereolabs | ステレオ | 長距離、屋外対応 |
| OAK-D | Luxonis | ステレオ+AI | エッジAI内蔵 |
距離センサー:LiDAR技術
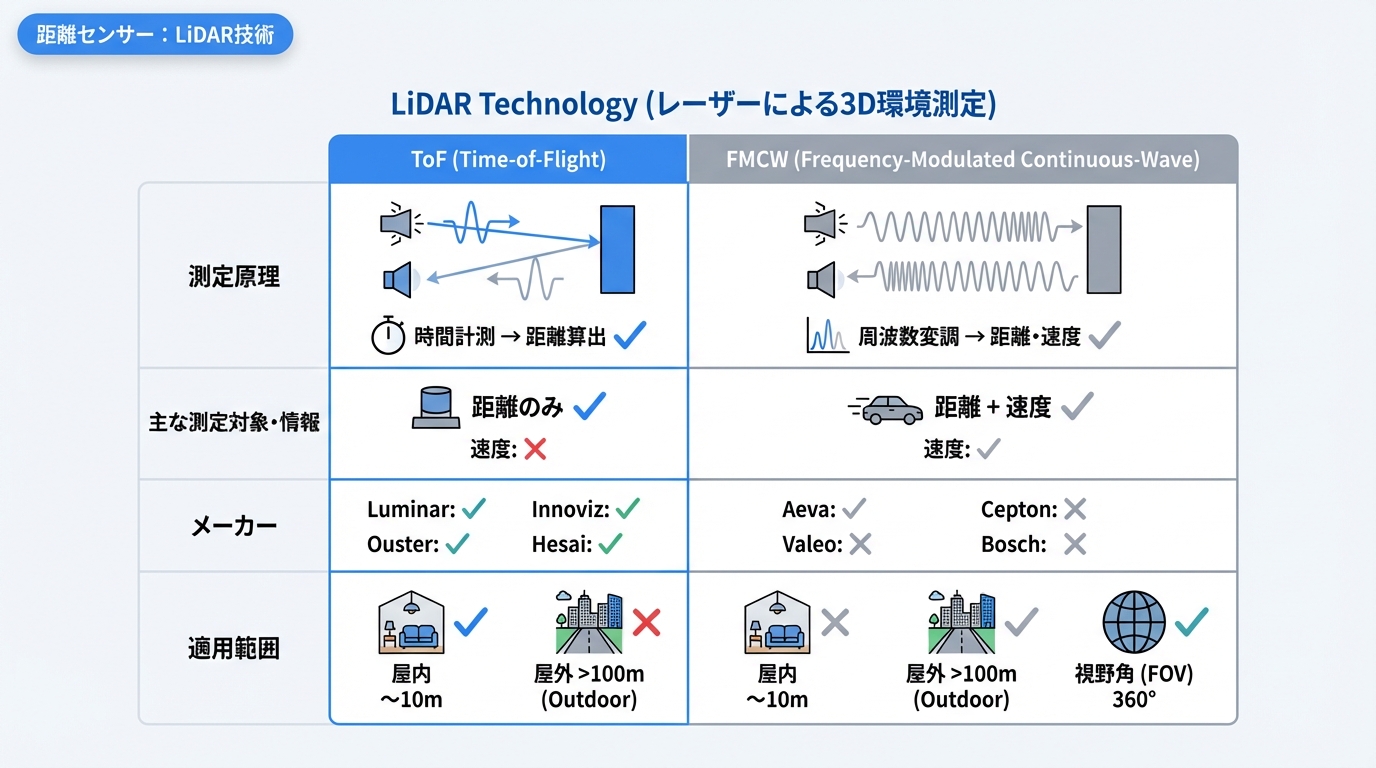
LiDAR(Light Detection and Ranging)は、レーザー光を用いて高精度な3D環境計測を行うセンサーです。自動運転やロボットナビゲーションの基盤技術として急速に普及しています。
LiDARの動作原理
- ToF方式:レーザーの往復時間から距離を計算
- FMCW方式:周波数変調で距離と速度を同時測定
- スキャン方式:機械式、MEMS、OPA(光学フェーズドアレイ)
主要LiDARメーカー比較
| メーカー | 代表製品 | 方式 | 主な用途 |
|---|---|---|---|
| Velodyne | VLP-16, Alpha Prime | 機械式 | 自動運転、測量 |
| Ouster | OS1, OS2 | デジタル | ロボット、産業 |
| Livox | Mid-360, HAP | 非反復スキャン | 低コスト自動運転 |
| SICK | LMS, TiM | 2D/3D | 産業用AGV |
| Hokuyo | UTM-30LX | 2D | 研究、サービスロボット |
LiDARの選定ポイント
- 測定距離:屋内10m程度、屋外100m以上
- 視野角(FOV):360°全周 or 前方のみ
- 点群密度:高密度ほど詳細な環境認識
- 耐環境性:IP規格、動作温度範囲
- コスト:数万円〜数百万円と幅広い
AGV・AMRの多くはLiDARを搭載してナビゲーションを行います。
慣性センサー:IMU技術
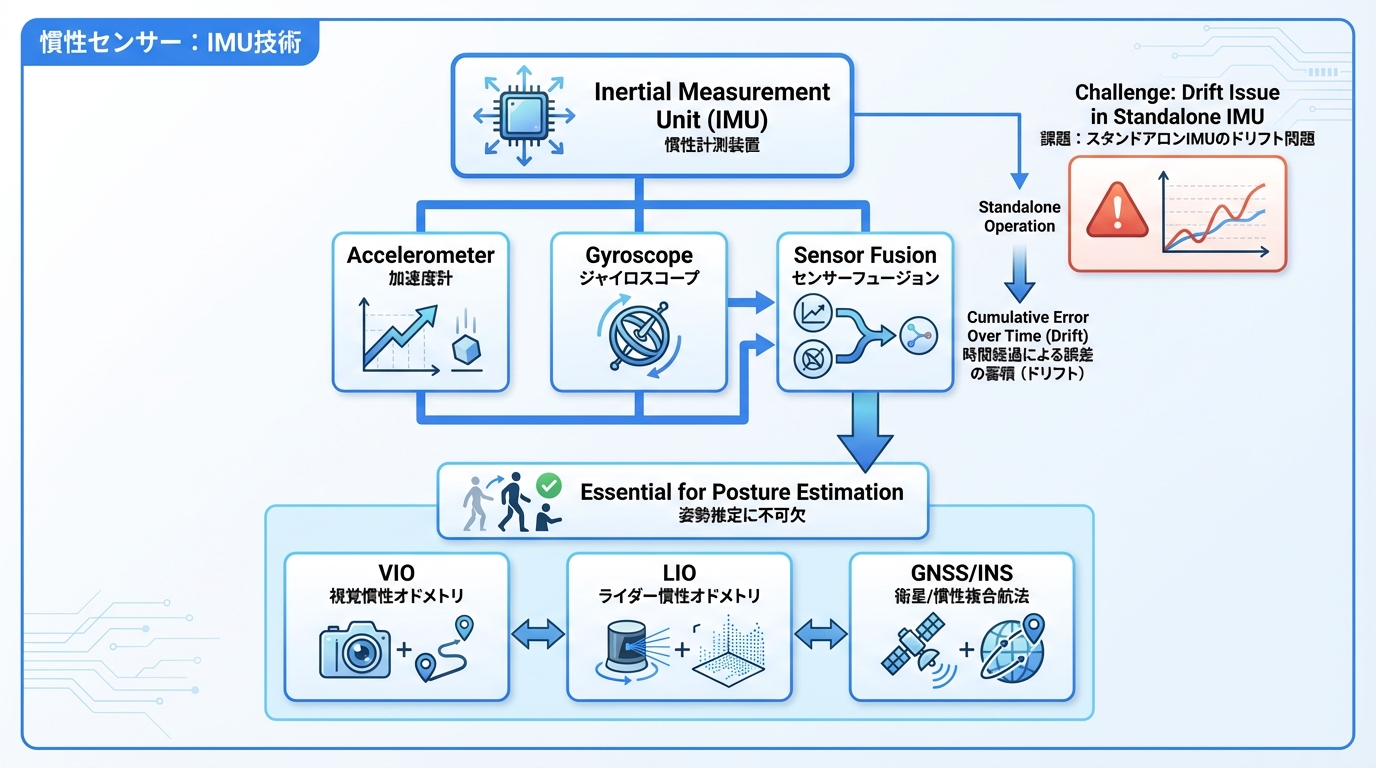
IMU(Inertial Measurement Unit)は、加速度とジャイロ(角速度)を測定するセンサーです。ロボットの姿勢推定や動作制御に不可欠です。
IMUの構成要素
| センサー | 測定物理量 | 用途 |
|---|---|---|
| 加速度計 | 直線加速度(3軸) | 傾き検出、衝撃検知 |
| ジャイロスコープ | 角速度(3軸) | 回転検出、姿勢制御 |
| 磁気センサー | 地磁気(3軸) | 方位検出(9軸IMU) |
IMUの精度グレード
| グレード | ジャイロドリフト | 価格帯 | 用途 |
|---|---|---|---|
| コンシューマ | >10°/h | 〜数千円 | スマートフォン、ゲーム |
| 産業用 | 1〜10°/h | 数万円 | ロボット、ドローン |
| タクティカル | 0.1〜1°/h | 数十万円 | 自動運転、測量 |
| ナビゲーション | <0.01°/h | 数百万円〜 | 航空機、船舶 |
センサーフュージョンの重要性
IMU単体ではドリフト(累積誤差)が発生するため、他のセンサーと組み合わせて使用します。
- VIO(Visual-Inertial Odometry):カメラ + IMU
- LIO(LiDAR-Inertial Odometry):LiDAR + IMU
- GNSS/INS:GPS + IMU
強化学習×ロボットでもIMUデータは重要な状態情報として活用されます。
力覚センサー:力とトルクの検出
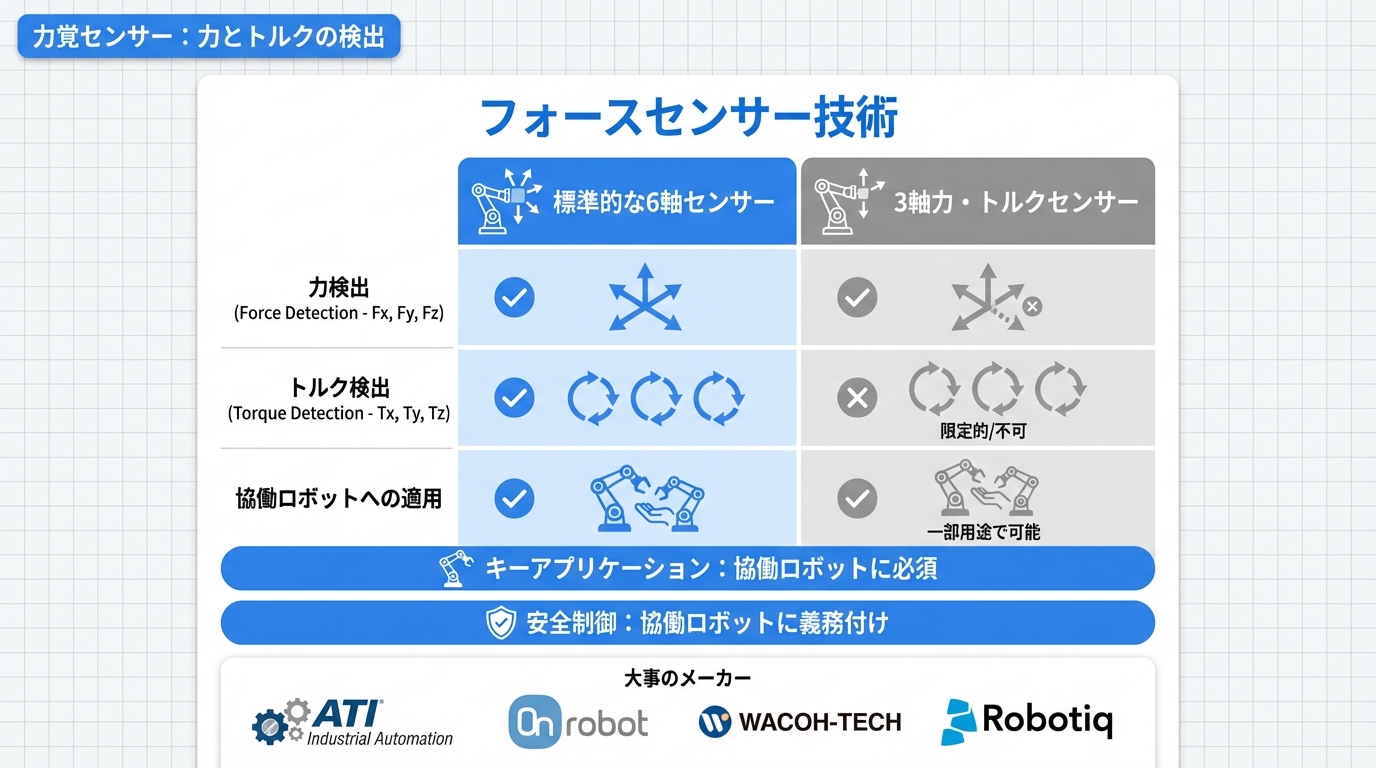
力覚センサーは、ロボットが外部と接触した際の力やトルクを検出するセンサーです。協働ロボットや精密組立に不可欠です。
力覚センサーの種類
| 種類 | 原理 | 特徴 | 用途 |
|---|---|---|---|
| ひずみゲージ式 | 金属の抵抗変化 | 高精度、実績豊富 | 産業用ロボット |
| 圧電式 | 圧電効果 | 高応答、動的測定 | 衝撃検知 |
| 静電容量式 | 容量変化 | 高感度、小型化可能 | 触覚センサー |
| 光学式 | 光の反射・干渉 | EMI耐性、MRI対応 | 医療ロボット |
6軸力覚センサー
産業用ロボットでは、3軸の力(Fx, Fy, Fz)と3軸のトルク(Tx, Ty, Tz)を同時に測定する6軸力覚センサーが標準です。
主要メーカー
- ATI Industrial Automation:業界標準、高精度
- OnRobot:協働ロボット向け、簡単統合
- WACOH-TECH:日本メーカー、カスタム対応
- Robotiq:URロボット統合
協働ロボットでは力覚センサーによる安全制御が必須です。
触覚センサー:接触情報の取得

触覚センサーは、接触の有無、圧力分布、滑り、温度などを検出するセンサーです。ソフトロボティクスやデクストラスマニピュレーションで重要性が高まっています。
触覚センサーの検出可能な情報
- 接触検知:物体との接触の有無
- 圧力分布:接触面の圧力マップ
- 滑り検出:把持物体の滑り
- テクスチャ:表面の粗さ・質感
- 温度:接触物体の温度
触覚センサーの方式
| 方式 | 原理 | 特徴 |
|---|---|---|
| 抵抗式 | 導電ゴムの抵抗変化 | 低コスト、大面積 |
| 静電容量式 | 電極間容量変化 | 高感度、高分解能 |
| 圧電式 | 圧電材料の電荷発生 | 高速応答、動的検出 |
| 光学式 | カメラで変形を観測 | 高解像度、柔軟構造 |
| 磁気式 | 磁場の変化検出 | 大変形対応 |
注目の触覚センサー技術
- GelSight:MITが開発、光学式で高解像度
- BioTac:指型、多モーダル(圧力・振動・温度)
- DIGIT:Meta/Facebook、低コスト光学式
ソフトロボティクスでは柔軟な触覚センサーの開発が活発です。
近接・距離センサー

近距離の物体検出に使用されるセンサー群です。衝突回避や物体検知に広く使われます。
近接センサーの種類
| 種類 | 検出原理 | 検出距離 | 特徴 |
|---|---|---|---|
| 超音波センサー | 音波の反射時間 | 数cm〜数m | 低コスト、透明物対応 |
| 赤外線センサー | 赤外線の反射強度 | 数cm〜数十cm | 高速、低消費電力 |
| ToFセンサー | 光の飛行時間 | 数cm〜数m | 高精度、小型 |
| 静電容量センサー | 電界変化 | 数mm〜数cm | 非接触、金属検出 |
| 誘導型センサー | 電磁誘導 | 数mm | 金属専用、高信頼性 |
用途別センサー選定
- 衝突回避:超音波、赤外線アレイ
- 物体検出:ToF、光電センサー
- 金属検出:誘導型、静電容量
- 液面検出:超音波、静電容量
センサーフュージョン:複数センサーの統合

実際のロボットシステムでは、複数のセンサーを組み合わせて信頼性と精度を向上させます。
センサーフュージョンの手法
| 手法 | 概要 | 用途 |
|---|---|---|
| カルマンフィルタ | 確率的状態推定 | 姿勢推定、位置推定 |
| 拡張カルマンフィルタ(EKF) | 非線形システム対応 | SLAM、VIO |
| パーティクルフィルタ | モンテカルロ法 | ロボットローカライゼーション |
| グラフ最適化 | 全体最適化 | SLAM、BA |
| ディープラーニング | 学習ベース統合 | 認識、予測 |
典型的なセンサー構成
- 自動運転車:LiDAR + カメラ + ミリ波レーダー + IMU + GNSS
- AMR/AGV:2D LiDAR + 深度カメラ + エンコーダ + IMU
- ドローン:カメラ + IMU + 気圧計 + 超音波
- 協働ロボット:力覚センサー + 近接センサー + エンコーダ
センサー技術の最新動向(2026年)

ロボットセンサー技術は急速に進化しています。
1. ソリッドステートLiDAR
可動部品のないLiDARが普及し、コストと信頼性が大幅に改善しています。
- MEMS方式、OPA方式の実用化
- 価格が1/10以下に低下
- 自動車への標準搭載が進行
2. AIセンサー
センサーにAI処理を内蔵し、エッジで認識処理を行う傾向が加速しています。
- スマートカメラ(物体検出内蔵)
- インテリジェントLiDAR
- AI触覚センサー
3. イベントベースセンサー
輝度変化のみを検出するイベントカメラが高速ロボットで採用されています。
- マイクロ秒レベルの時間分解能
- 低消費電力、低データレート
- ドローン、高速マニピュレーションに最適
4. 柔軟・伸縮センサー
ソフトロボティクスの発展に伴い、変形可能なセンサーの開発が進んでいます。
- 伸縮可能なひずみセンサー
- 曲面対応の触覚センサー
- ウェアラブル統合センサー
Embodied AIの発展にはこれらの高度なセンサー技術が不可欠です。
まとめ|ロボットセンサー選定のポイント

ロボットセンサーは用途に応じた適切な選定が重要です。
センサー選定チェックリスト
- 環境条件:屋内/屋外、照明、温度、振動
- 精度要件:必要な測定精度と分解能
- 速度要件:サンプリングレート、遅延
- 統合性:既存システムとのインターフェース
- コスト:初期費用、メンテナンス費用
- 信頼性:MTBF、冗長性
今後の展望
- センサーの低コスト化・小型化が継続
- AI統合による知能化
- マルチモーダルセンサーの普及
- ソフトロボット向け柔軟センサーの発展
関連記事としてフィジカルAIの動向もご覧ください。
https://ainow.jp/slam-technology-guide/
https://ainow.jp/cobots/

https://ainow.jp/patrol-security-robot-guide/