
AINOW(エーアイナウ)編集部です。産業用ロボットやピッキングロボットの性能を左右する最も重要な要素が「エンドエフェクター」です。ロボットアームの先端に取り付けられるこのツールは、ワークの形状や素材、作業内容に応じて適切に選定する必要があります。本記事では、グリッパーからツールまで、エンドエフェクターの基礎知識から最新技術、選定のポイントまで体系的に解説します。ロボット導入を検討している方や、生産性向上を目指すエンジニアの方は、ぜひ参考にしてください。
この記事のサマリー
- エンドエフェクターの種類(機械式・真空・磁気・ソフトグリッパー)と特徴を比較解説
- ワーク形状・素材・サイクルタイムに基づく最適なグリッパー選定方法を紹介
- 2026年最新のAIビジョン連携・適応型グリッパー・デクステラスハンドの動向を解説
エンドエフェクターとは?
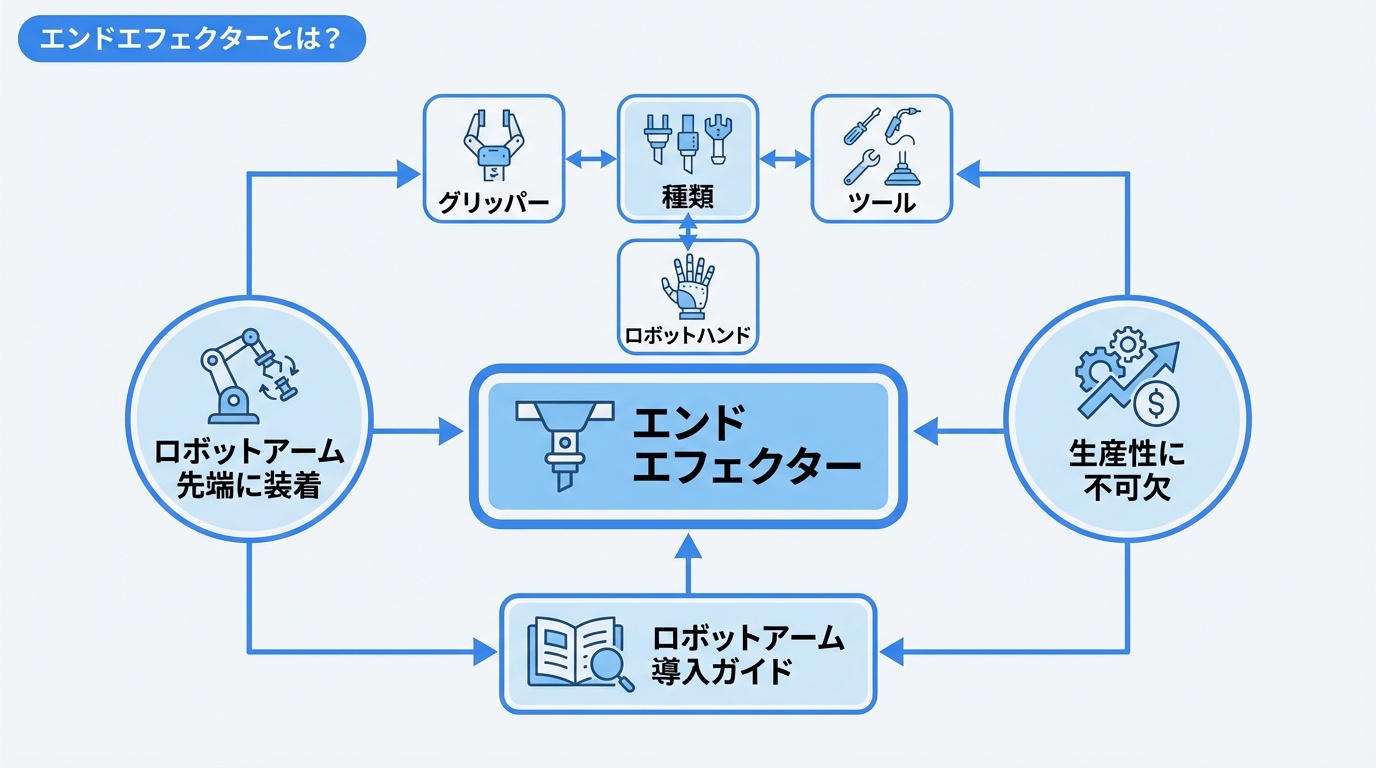
エンドエフェクターは、ロボットアームの先端に取り付けられる作業装置です。人間でいえば「手」に相当する部分であり、ロボットが外部環境と直接接触する唯一のインターフェースとなります。
エンドエフェクターの定義
エンドエフェクター(End Effector)とは、ロボットアームの最終端に装着され、実際の作業を実行するデバイスの総称です。産業界では「ロボットハンド」「グリッパー」「ツール」など様々な呼称がありますが、すべてエンドエフェクターの一種です。
|
エンドエフェクターの選定を誤ると、どれだけ高性能なロボットアームを導入しても期待した生産性を得られません。詳しくはロボットアーム入門ガイドで、アーム本体との関係性を解説しています。
グリッパーとツールの違い
エンドエフェクターは大きく「グリッパー」と「ツール」に分類されます。
| 分類 | 目的 | 具体例 | 主な用途 |
|---|---|---|---|
| グリッパー | 物体の把持・保持 | 機械式、真空式、磁気式 | 搬送、ピッキング、組立 |
| ツール | 加工・処理 | 溶接トーチ、塗装ガン | 溶接、塗装、研磨 |
グリッパーは「掴む」ことに特化し、ツールは「加工する」ことに特化しています。物流倉庫のピッキングロボットではグリッパーが、製造ラインでは用途に応じてグリッパーとツールの両方が使われます。

AINOW編集部
|
実際の現場では、同一アームにグリッパーとツールを切り替えて使う「ツールチェンジャー」の導入が増えています。 |
グリッパーの種類
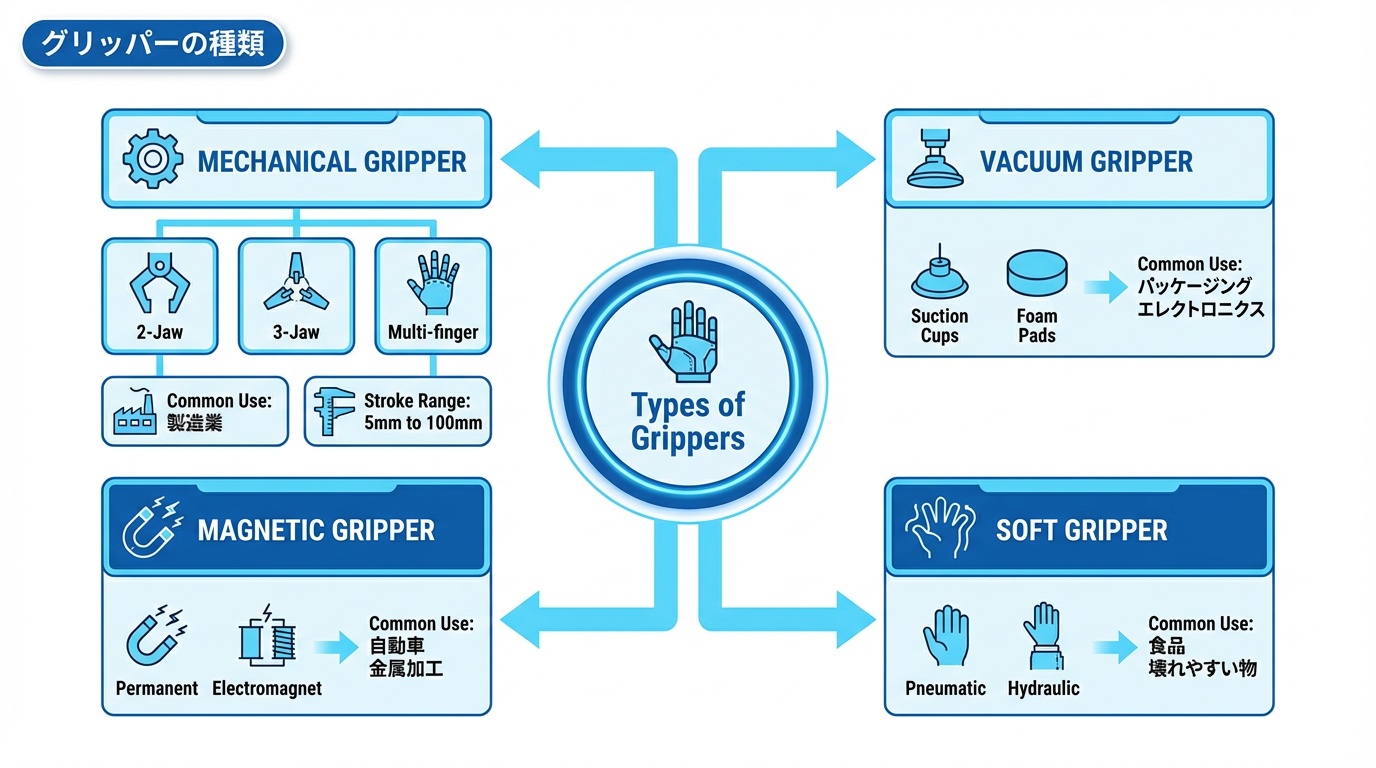
グリッパーにはワークの特性に応じた様々な方式があります。ここでは代表的な4種類を解説します。
機械式グリッパー(2爪、3爪、多指)
機械式グリッパーは最も一般的なタイプで、機械的な「爪」でワークを挟み込んで把持します。
| タイプ | 特徴 | 適用ワーク | 把持力目安 |
|---|---|---|---|
| 2爪(平行) | シンプル、高精度 | 角形、円筒形の定形品 | 5〜500N |
| 3爪 | 円形ワークに最適 | 円筒、球体 | 10〜300N |
| 多指(5指以上) | 複雑形状に対応 | 不定形、多品種 | 1〜50N |
2爪の平行グリッパーは製造業で最も普及しており、高速・高精度な作業に適しています。開閉ストロークは数mm〜100mm程度で、電動式・空気圧式から選択できます。
真空グリッパー(吸着パッド)
真空グリッパーは、吸着パッドで負圧を発生させてワークを保持します。表面が平滑なワークに最適です。
|
段ボール箱、ガラス、金属板など、表面が滑らかで密閉性のあるワークに広く使用されています。複数パッドの配置で大型・重量ワークにも対応可能です。
磁気グリッパー
磁気グリッパーは、電磁石または永久磁石の磁力でワークを保持します。鉄系金属の搬送に特化しています。
電磁式は通電のON/OFFで瞬時に把持・解放ができ、永久磁石式は停電時も保持力を維持できる安全性があります。自動車産業の鋼板搬送、機械加工後の鉄部品ハンドリングで活用されています。
ソフトグリッパー
ソフトグリッパーは、柔軟な素材(シリコン、ゴム、布)で構成され、繊細なワークや不定形品の把持に適しています。
| タイプ | 駆動方式 | 特徴 | 適用例 |
|---|---|---|---|
| 空気圧駆動 | 加圧・減圧 | 柔軟な形状追従 | 食品、医薬品 |
| ジャミング式 | 粒子充填 | 任意形状に適合 | 不定形品、果物 |
| フィンレイ型 | 空気圧 | 指状の曲げ動作 | 組立作業 |
傷つきやすいワークや形状が一定でない農産物・食品の把持では、ソフトグリッパーの導入が進んでいます。詳細な把持技術はロボットマニピュレーション入門で解説しています。
|
AINOW編集部
|
食品業界では衛生基準を満たしたソフトグリッパーの需要が急増しています。FDA認証取得品を選ぶと安心です。 |
特殊ツール
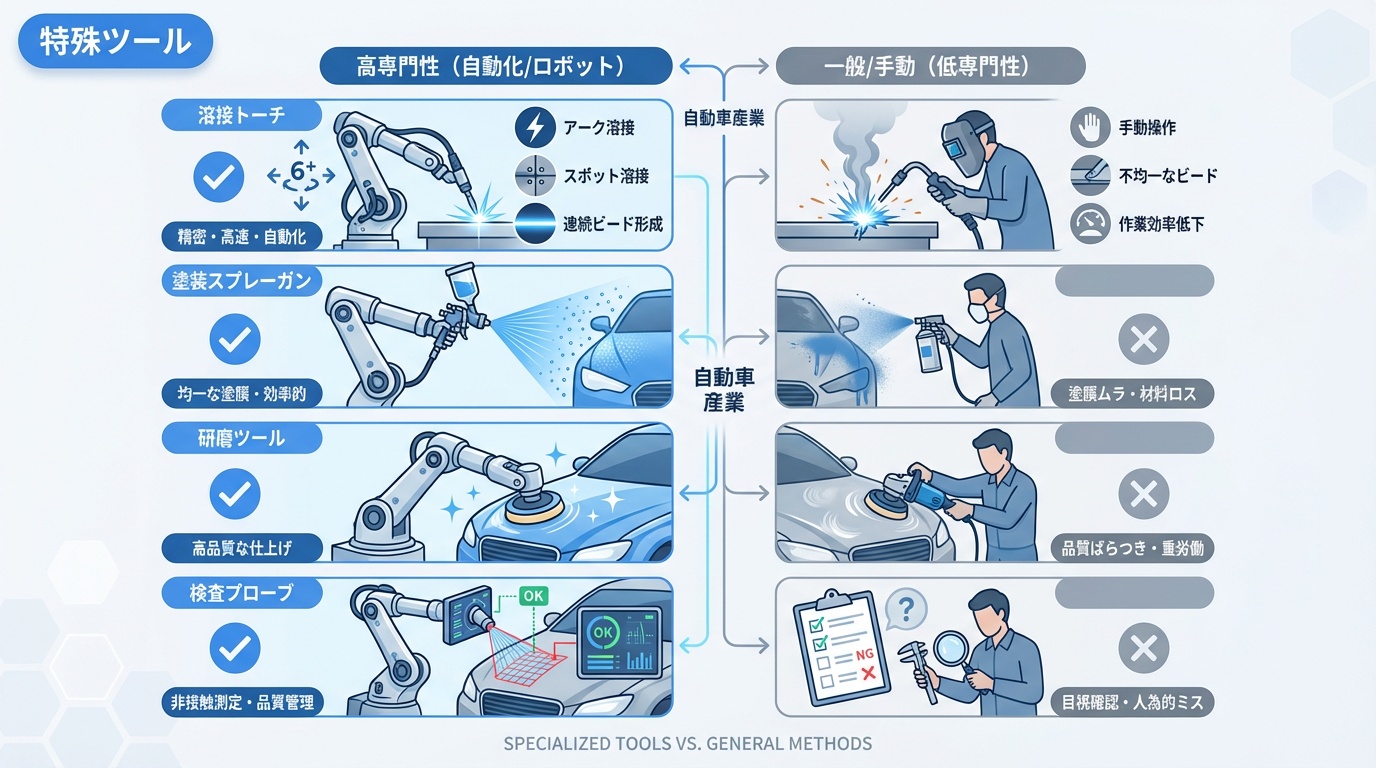
把持以外の加工作業には、専用の特殊ツールが使われます。代表的な4種類を紹介します。
溶接トーチ
溶接トーチは、アーク溶接やスポット溶接を行うためのエンドエフェクターです。自動車産業で最も普及しています。
MIG/MAG溶接トーチは連続的な溶接ビードを形成し、スポット溶接ガンは点溶接で板金を接合します。6軸以上の自由度を持つロボットアームとの組み合わせで、複雑な溶接経路にも対応できます。
塗装スプレーガン
塗装スプレーガンは、均一な塗膜を形成するためのツールです。静電塗装対応型が主流となっています。
|
研磨・バリ取りツール
研磨・バリ取りツールは、切削加工後の仕上げ工程で使用されます。力制御機能との連携が重要です。
回転式の研磨ヘッド、ベルトサンダー、フローティング機構付きツールなど多様な形態があります。一定の押し付け力を維持しながら表面を均一に仕上げるため、力覚センサーとの組み合わせが標準的です。
検査プローブ
検査プローブは、寸法測定や外観検査を自動化するためのツールです。タッチプローブとビジョンプローブが代表的です。
タッチプローブは接触式でμm単位の精度測定が可能です。ビジョンプローブはカメラ搭載で非接触測定を行い、外観検査やバーコード読取りにも対応します。
グリッパー選定のポイント

最適なグリッパーを選定するには、ワーク特性と作業要件を総合的に評価する必要があります。
ワーク形状と素材
ワークの形状と素材はグリッパー選定の最重要ファクターです。
| ワーク特性 | 推奨グリッパー | 理由 |
|---|---|---|
| 剛体・定形品 | 機械式 | 確実な把持、高速動作 |
| 平滑表面 | 真空式 | 非接触に近い把持 |
| 鉄系金属 | 磁気式 | 表面状態に依存しない |
| 柔軟物・不定形 | ソフト式 | 形状追従性 |
素材面では、表面の硬度、摩擦係数、耐熱性、導電性を考慮します。食品や医薬品では衛生規格(FDA、EHEDG)への適合も必須条件です。
把持力と精度
把持力はワーク重量と加減速度から算出します。安全率は一般に3〜5倍を見込みます。
必要把持力の計算式:F = m × (g + a) × μ × S
- m:ワーク質量
- g:重力加速度(9.8m/s²)
- a:最大加速度
- μ:摩擦係数
- S:安全率(3〜5)
位置決め精度は組立作業で特に重要です。機械式グリッパーで±0.01mm、真空式で±0.1mm程度が一般的な指標となります。
サイクルタイムとの関係
サイクルタイムを短縮するには、グリッパーの動作速度と応答性が鍵となります。
|
|
AINOW編集部
|
グリッパー選定時は、カタログスペックだけでなく実ワークでの検証テストを必ず実施してください。 |
クイックチェンジャー
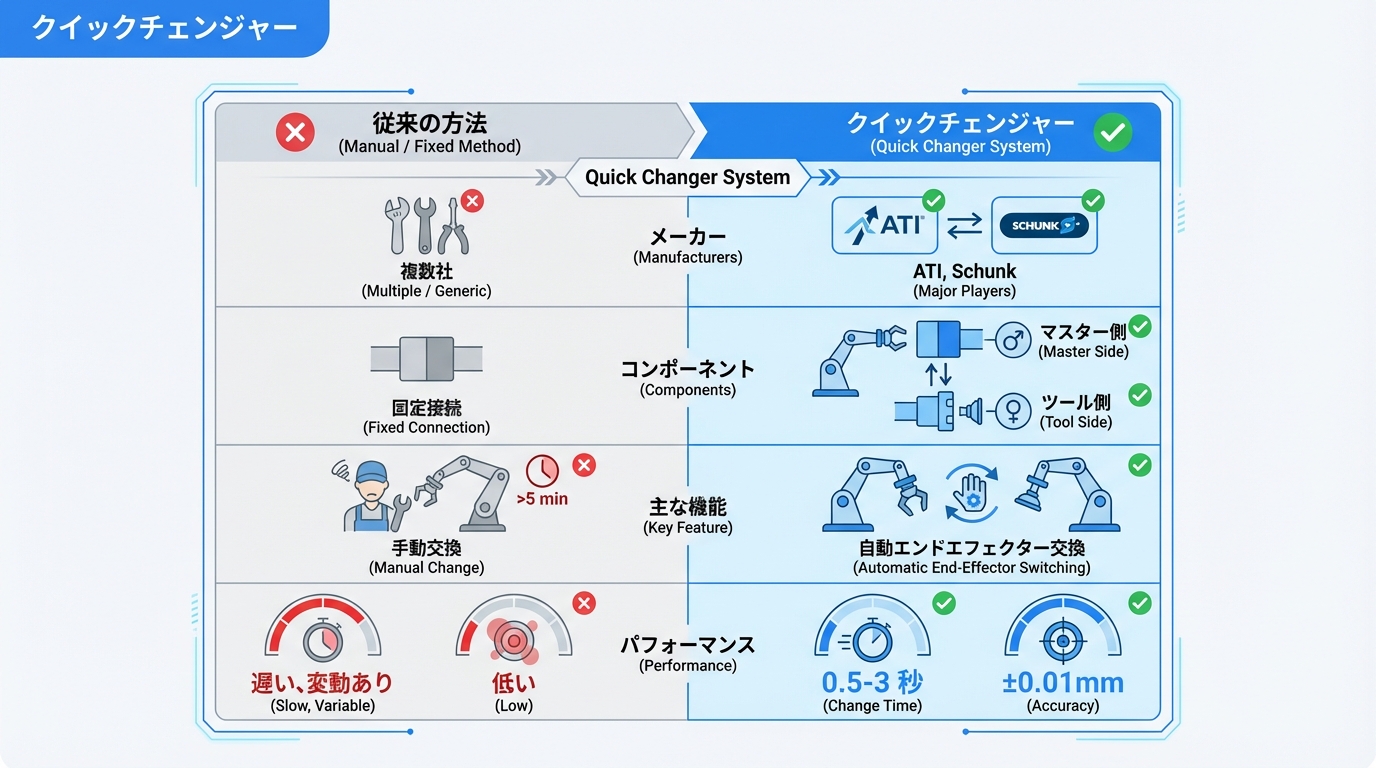
多品種対応やツール切替が必要な現場では、クイックチェンジャー(ツールチェンジャー)が活躍します。
ツール自動交換システム
クイックチェンジャーは、ロボットが自動的にエンドエフェクターを交換するためのシステムです。マスター側(アーム側)とツール側(エンドエフェクター側)で構成されます。
| 機能 | 説明 | メリット |
|---|---|---|
| 機械的結合 | ロック機構による確実な固定 | 高い剛性と位置再現性 |
| 電気接続 | 信号線の自動接続 | センサー・アクチュエータ対応 |
| 空圧/油圧接続 | 流体配管の自動接続 | 空圧グリッパー対応 |
交換時間は0.5〜3秒程度で、位置再現性は±0.01mm以下を実現する製品もあります。ツールスタンドに複数のエンドエフェクターを配置し、プログラムで自動切替が可能です。
主要メーカー(ATI、Schunk)
クイックチェンジャー市場では、ATI Industrial AutomationとSCHUNKが世界的なシェアを持っています。
| メーカー | 代表製品 | 特徴 | 可搬重量範囲 |
|---|---|---|---|
| ATI | QC-11〜QC-210 | 力覚センサー連携 | 0.5〜2,100kg |
| SCHUNK | SWS-001〜SWS-120 | モジュール設計 | 1〜500kg |
| Staubli | MPS/MPSシリーズ | 高サイクル対応 | 3〜350kg |
選定時は可搬重量、繰返し位置精度、交換サイクル数(寿命)、接続ポート数を確認しましょう。
センシング技術
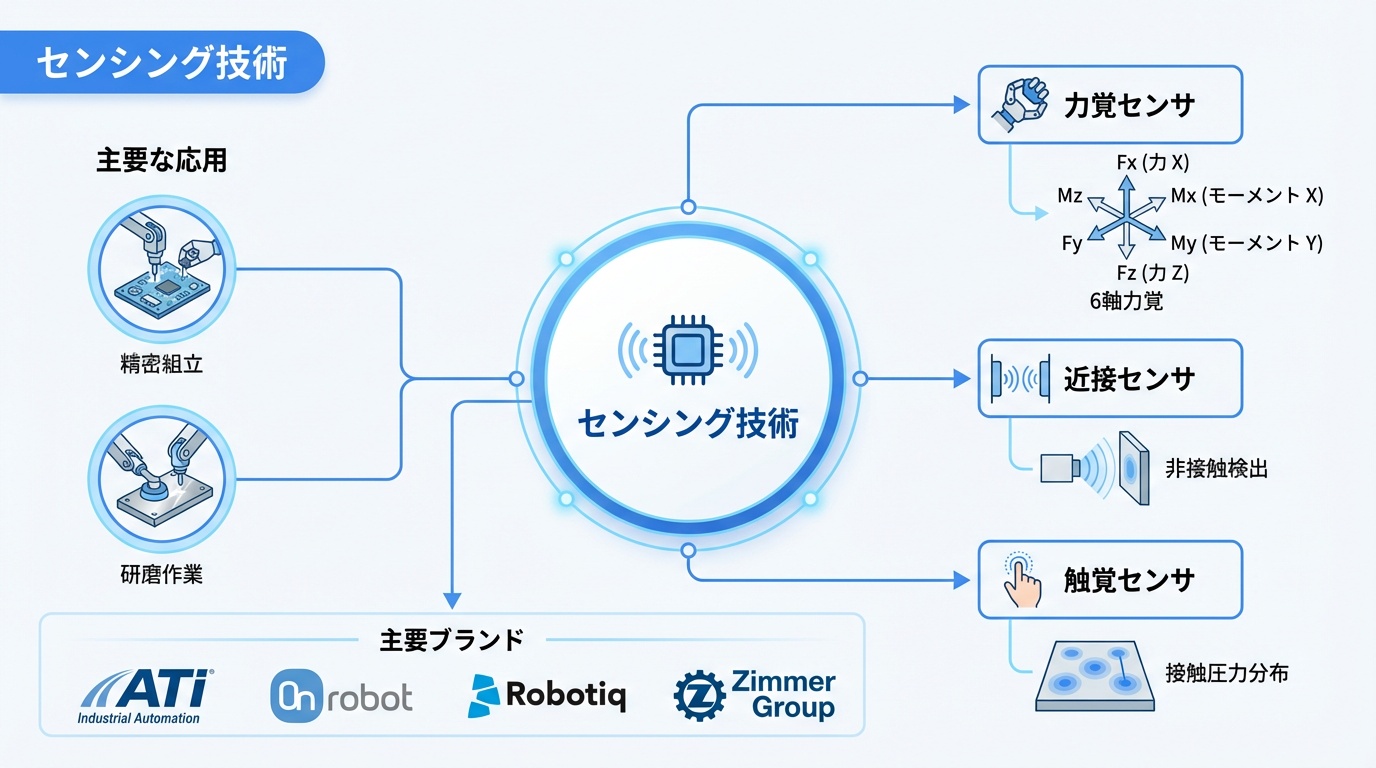
エンドエフェクターの高度化に伴い、センシング技術の重要性が増しています。
力覚センサー内蔵
力覚センサーは、把持力や接触力を6軸(Fx、Fy、Fz、Mx、My、Mz)で計測します。精密組立や研磨作業では必須の技術です。
|
ATI Industrial Automation、OnRobot、Robotiq、Zimmerなどが力覚センサー内蔵グリッパーを展開しています。
近接センサー
近接センサーは、ワークの有無や位置を非接触で検出します。光電式、静電容量式、誘導式が代表的です。
グリッパーの爪部に内蔵することで、把持前のワーク検出や、把持後の保持確認が可能です。検出距離は数mm〜数十mmで、応答速度は1ms以下の高速タイプもあります。
触覚センサー
触覚センサーは、接触面の圧力分布を面で検出する技術です。ソフトグリッパーとの組み合わせが進んでいます。
圧力感応ゴム、ピエゾ素子、静電容量式などの方式があります。把持力の最適化、滑り検知、ワーク識別など、人間の指に近い感覚フィードバックを実現します。
最新動向(2026年)
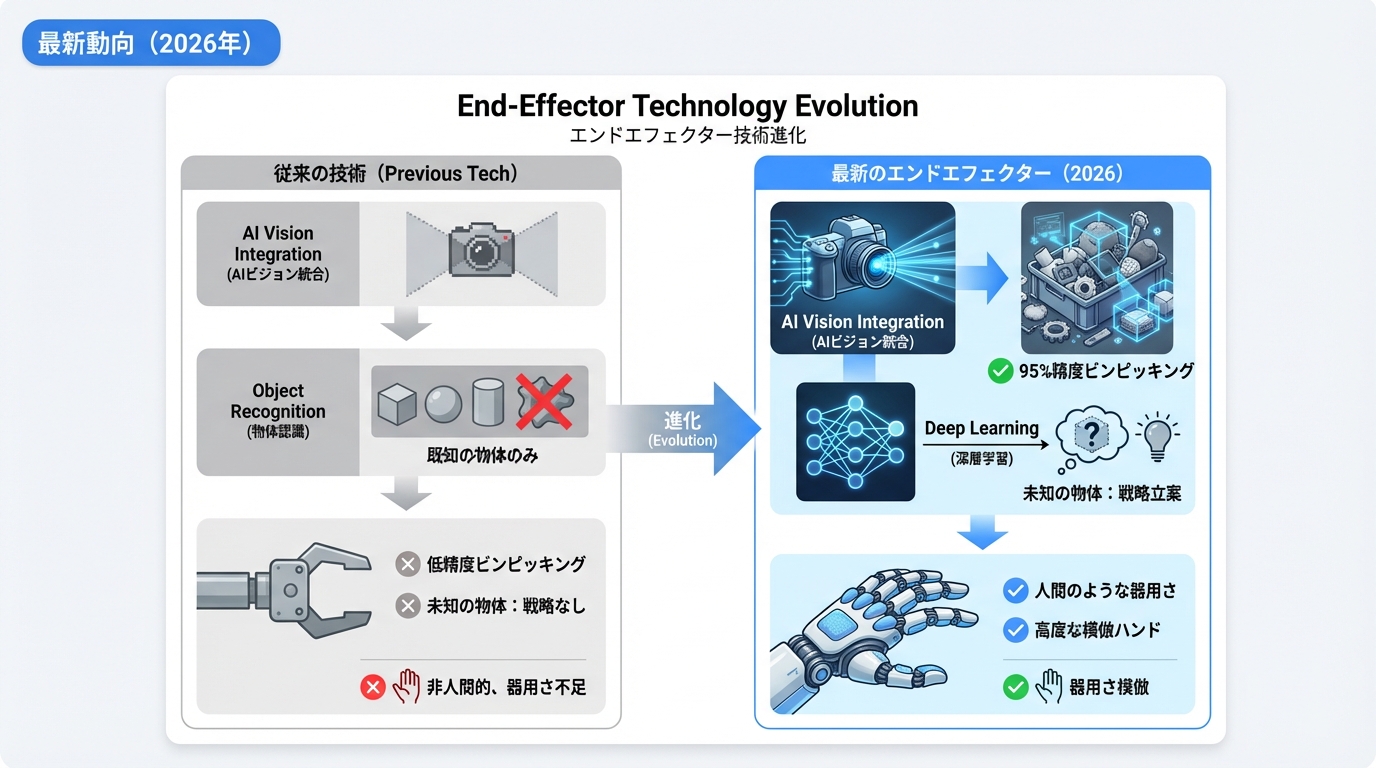
2026年現在、エンドエフェクター技術はAI統合と高度なセンシングによって急速に進化しています。
AIビジョン連携
AIビジョン連携により、カメラ画像からワークの種類・姿勢・把持点を自動認識する技術が実用化しています。
深層学習ベースの物体認識と把持点推定を組み合わせることで、未知のワークに対しても適切な把持戦略を生成できます。事前のティーチングなしで多品種ワークに対応する「ビンピッキング」の精度は95%以上に達しています。
適応型グリッパー
適応型グリッパーは、ワーク形状に自動で追従する機構を持ちます。アンダーアクチュエーテッド設計が主流です。
1つのアクチュエータで複数の関節を駆動し、ワーク形状に応じて指が自然に巻き付く動作を実現します。多品種対応と低コストを両立する技術として注目されています。
人間の手を模倣するデクステラスハンド
デクステラスハンドは、人間の手に近い器用さ(dexterity)を持つ多指ロボットハンドです。
| 製品 | メーカー | 指数 | 自由度 | 特徴 |
|---|---|---|---|---|
| Shadow Hand | Shadow Robot | 5指 | 24 DOF | 人間の手に最も近い |
| Allegro Hand | Wonik | 4指 | 16 DOF | 研究用途で普及 |
| LEAP Hand | CMU | 4指 | 16 DOF | オープンソース |
強化学習との組み合わせで、人間が行うような器用な操作(インハンドマニピュレーション)の実現が進んでいます。詳しくはロボットマニピュレーション入門で解説しています。
|
AINOW編集部
|
2026年はヒューマノイドロボットの実用化が進み、デクステラスハンドの量産化と低価格化が加速しています。 |
主要メーカー比較
エンドエフェクター市場には多くのメーカーが参入しています。海外大手と国内メーカーを比較します。
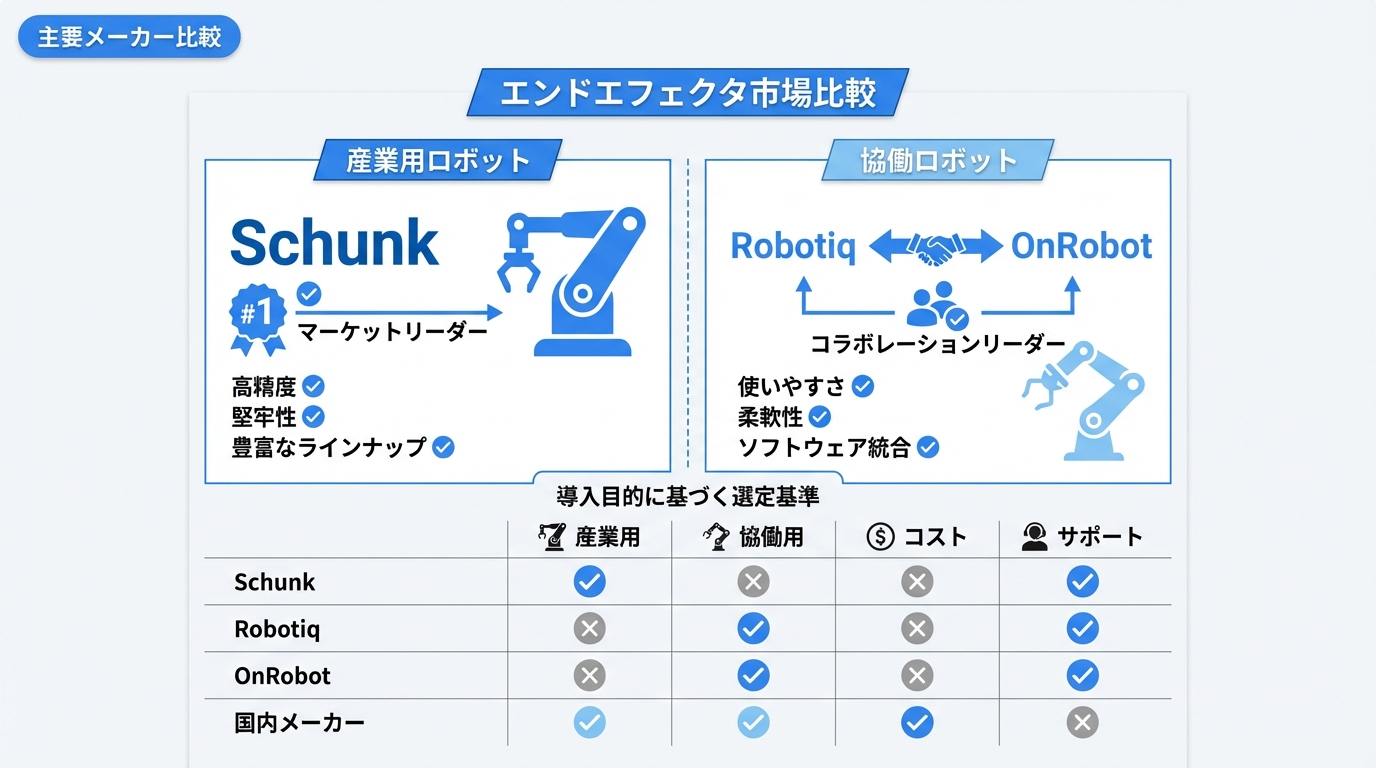
Schunk、Robotiq、OnRobot
グリッパー市場の3大グローバルメーカーを比較します。
| メーカー | 本社 | 強み | 代表製品 | 価格帯 |
|---|---|---|---|---|
| SCHUNK | ドイツ | 産業用の高品質・高精度 | PGN-plus、EGP | 中〜高 |
| Robotiq | カナダ | 協働ロボット対応、簡単設置 | 2F-85、Hand-E | 中 |
| OnRobot | デンマーク | プラグ&プレイ、統合ソリューション | RG2、VG10 | 中 |
SCHUNKは産業用ロボット向けで世界No.1のシェアを持ち、RobotiqとOnRobotは協働ロボット市場をリードしています。導入目的に応じて選定してください。
国内メーカー
日本国内にも優れたエンドエフェクターメーカーがあります。
| メーカー | 強み | 代表製品 | 特徴 |
|---|---|---|---|
| SMC | 空圧機器トップ | MHCシリーズ | 空圧グリッパーで世界シェア |
| CKD | 空圧・真空機器 | HPGシリーズ | 高精度グリッパー |
| THK | リニアガイド | RSHシリーズ | 高剛性・高精度 |
| 近藤製作所 | 専用チャック | HLC、BHシリーズ | カスタム対応力 |
国内メーカーは日本語でのサポート、短納期、カスタム対応の柔軟性が強みです。ロボットアームとの相性も含めて検討することをおすすめします。
よくある質問
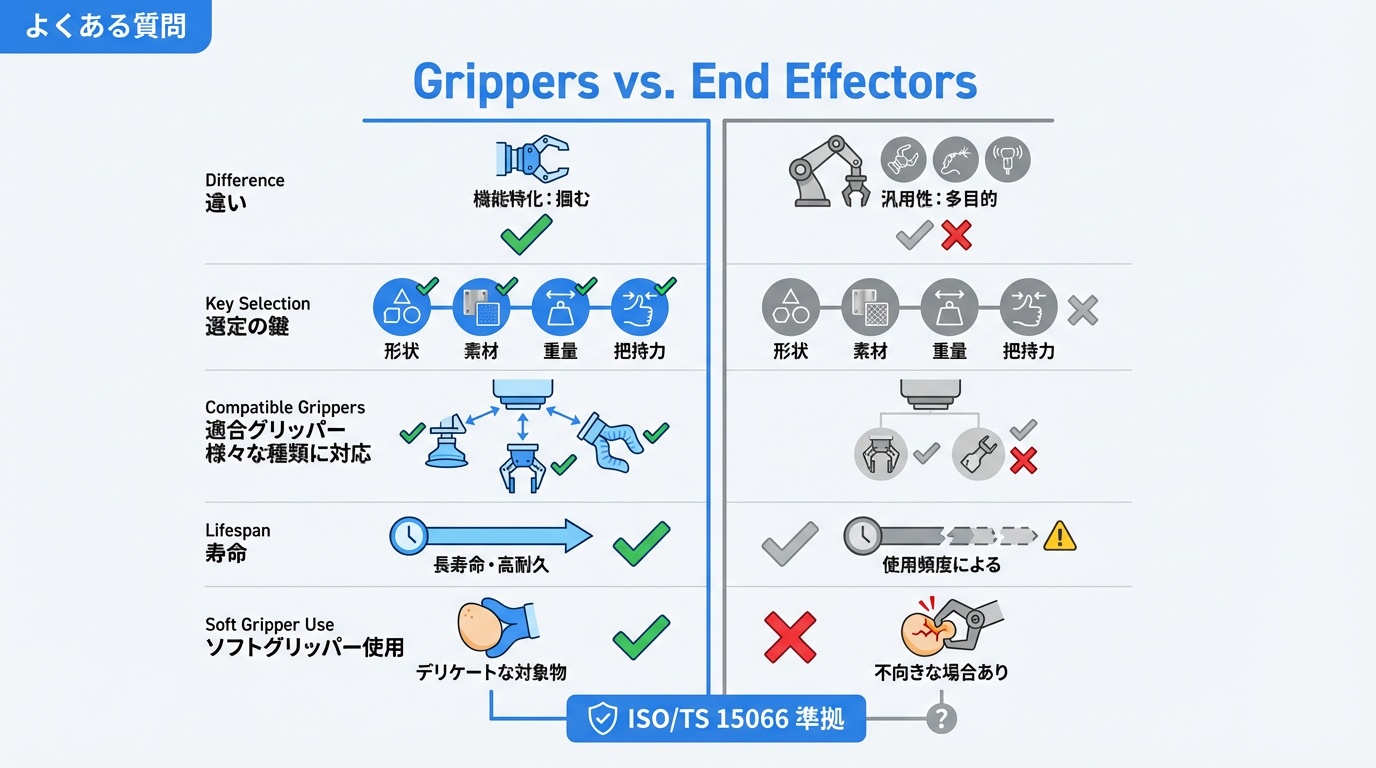
Q. エンドエフェクターとグリッパーの違いは何ですか?
A. エンドエフェクターはロボットアーム先端に取り付けるすべての作業装置の総称で、グリッパーはその中で「把持」に特化したタイプです。溶接トーチや塗装ガンなどの加工ツールもエンドエフェクターに含まれます。
Q. グリッパーの選定で最も重要なポイントは何ですか?
A. ワークの形状・素材・重量が最重要です。次に把持力、位置決め精度、サイクルタイムの要件を確認し、作業環境(温度、防塵防水、衛生規格)も考慮して選定します。
Q. 協働ロボットに使えるグリッパーはどれですか?
A. RobotiqやOnRobotの製品は協働ロボット各社に対応しています。ISO/TS 15066の安全規格に適合し、プラグ&プレイで簡単に設置できる製品を選ぶと導入がスムーズです。
Q. グリッパーの耐用年数はどのくらいですか?
A. 使用条件によりますが、機械式グリッパーで500万〜1,000万回の開閉サイクル、真空グリッパーのパッドは消耗品として3〜6ヶ月での交換が目安です。定期的なメンテナンスで寿命を延ばせます。
Q. ソフトグリッパーはどのような用途に適していますか?
A. 食品(パン、果物、野菜)、医薬品、電子部品など傷つきやすいワークや、形状が不定形な製品の把持に適しています。FDA認証取得品を選べば食品工場での使用も可能です。
まとめ|エンドエフェクター選定チェックリスト
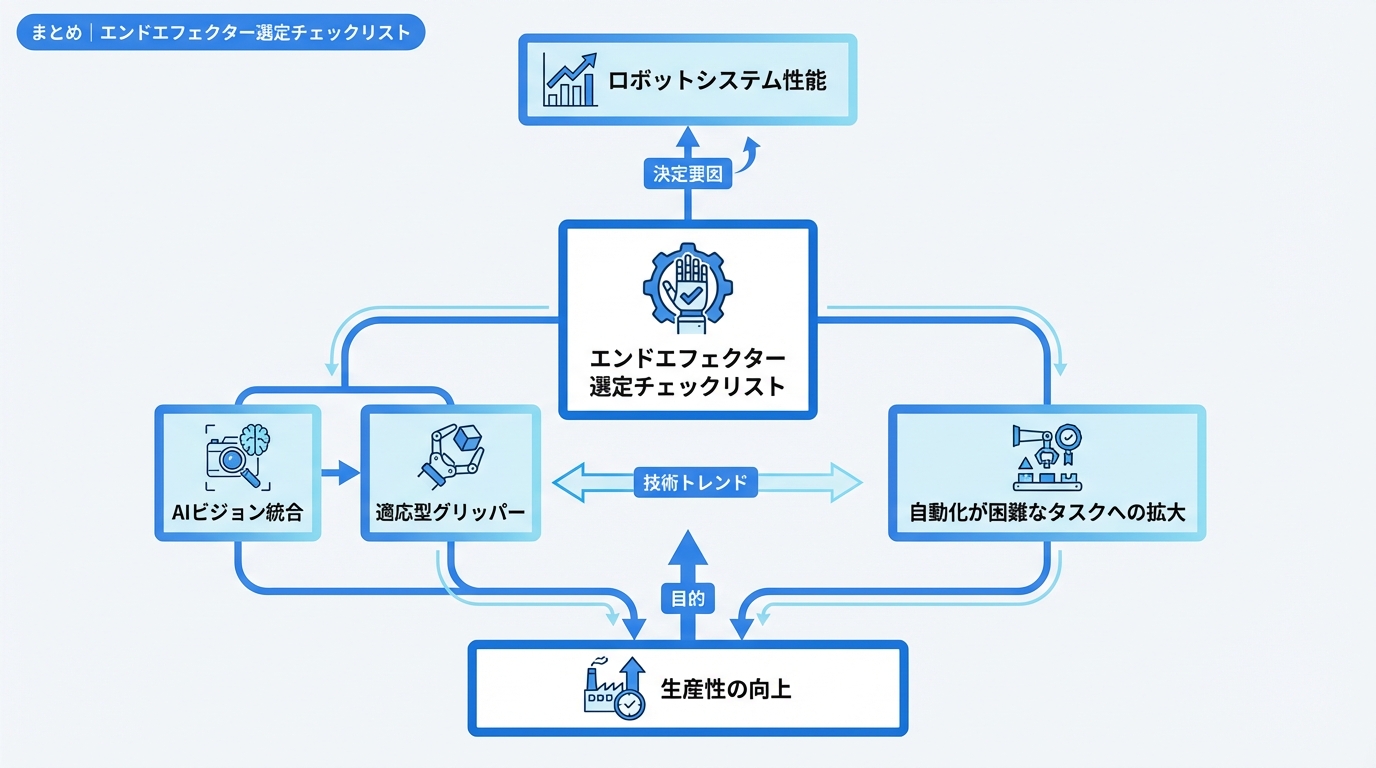
エンドエフェクターはロボットシステムの性能を決定づける重要な要素です。本記事の内容を踏まえ、以下のチェックリストを参考に選定を進めてください。
|
2026年はAIビジョンとの連携や適応型グリッパーの進化により、従来は自動化が困難だった作業領域にもロボットが進出しています。ピッキングロボットやロボットアームと合わせて、最適なエンドエフェクターを選定し、生産性向上を実現してください。
 GitHub Copilot
GitHub Copilot Replit Agent
Replit Agent Cline
Cline Dify
Dify Jinbaflow
Jinbaflow