
スウォームロボティクス(群ロボット工学)は、多数のシンプルなロボットが協調して複雑なタスクを実行する技術です。蜂の群れや蟻の行列のように、個々は単純でも集団で知的な振る舞いを実現します。本記事では、スウォームロボティクスの基本原理から応用事例、最新研究まで徹底解説します。
スウォームロボティクスとは?基本概念
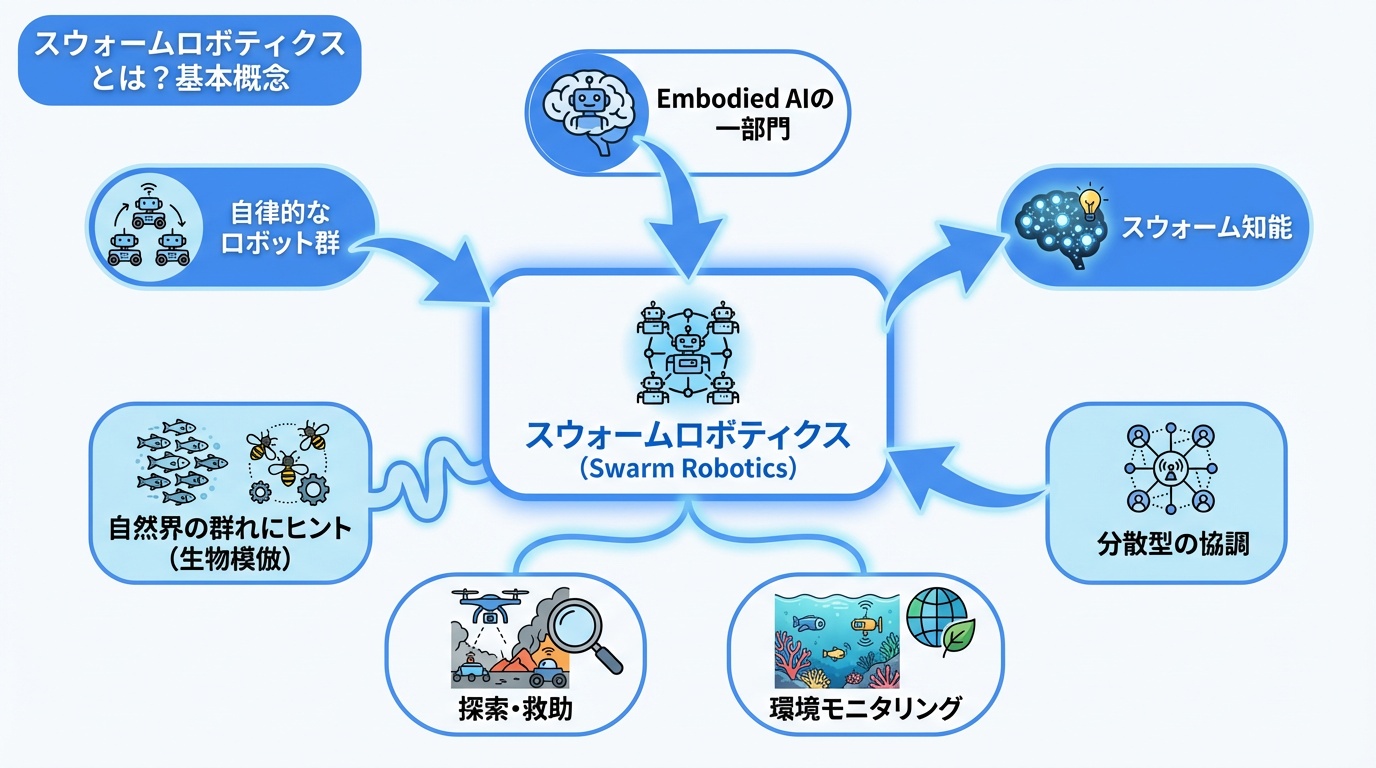
スウォームロボティクス(Swarm Robotics)は、多数の自律ロボットが分散・協調して動作するシステムを研究する分野です。自然界の群知能(Swarm Intelligence)にインスピレーションを得ています。
群知能のモデル生物
| 生物 | 群れの特徴 | ロボットへの応用 |
|---|---|---|
| 蟻 | フェロモンによる経路探索 | 最適経路発見、物資輸送 |
| 蜂 | ダンスによる情報伝達 | 探索・マッピング |
| 魚群 | 整列・群泳 | 編隊制御、監視 |
| 鳥群 | V字編隊 | エネルギー効率飛行 |
| バクテリア | 化学走性 | 環境センシング |
スウォームロボティクスの特徴
| 特徴 | 説明 | メリット |
|---|---|---|
| 分散制御 | 中央コントローラー不要 | 単一障害点なし |
| スケーラビリティ | 台数増減に柔軟対応 | 大規模展開可能 |
| 頑健性 | 一部故障でも全体機能 | 高い信頼性 |
| 柔軟性 | 環境変化に自己適応 | 動的タスク対応 |
| コスト効率 | 単純・安価なロボット | 低コスト展開 |
Embodied AIの一分野としても研究が進んでいます。
スウォームロボットの動作原理
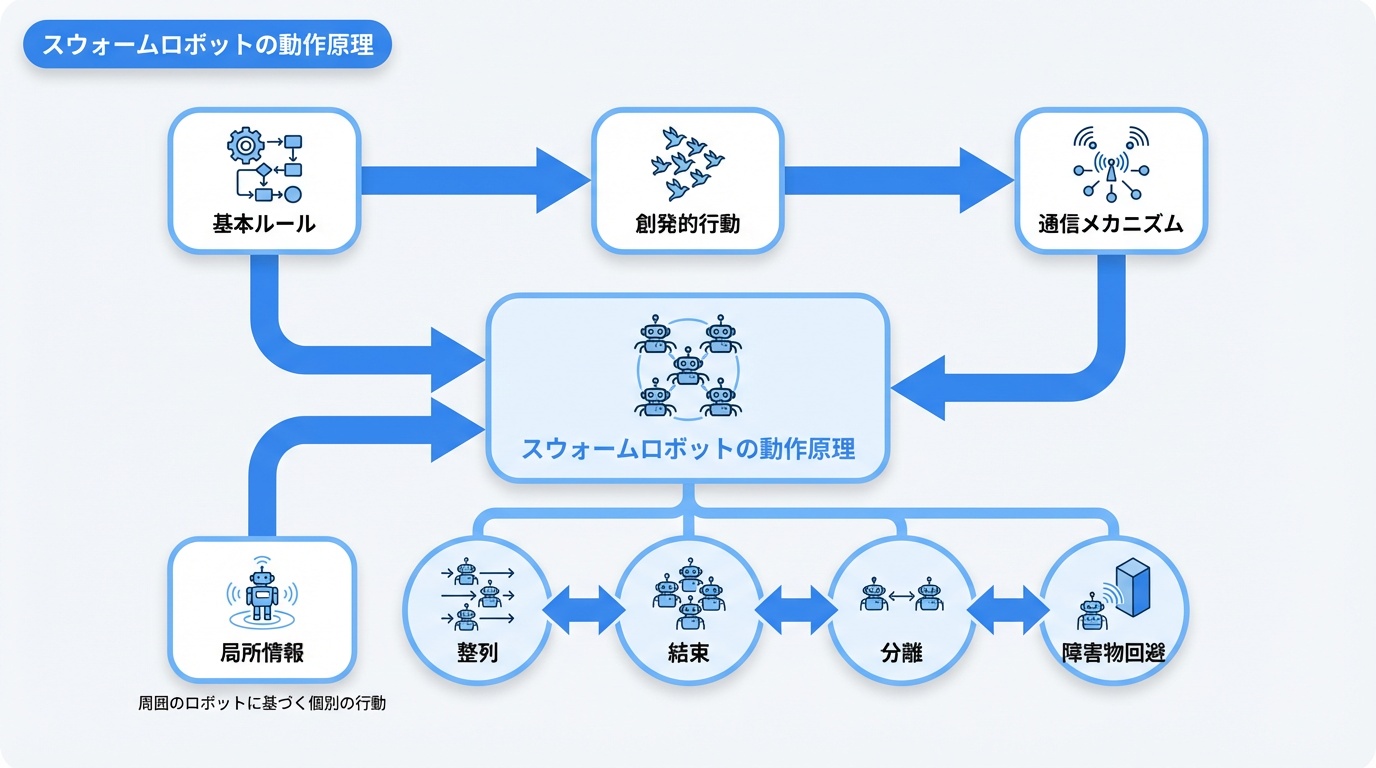
個々のロボットは単純なルールに従い、局所的な情報のみで行動します。これにより群れ全体として知的な振る舞いが創発します。
基本的な行動ルール
- 整列(Alignment):近隣ロボットと同じ方向に移動
- 凝集(Cohesion):群れの中心に向かう
- 分離(Separation):近すぎる仲間から離れる
- 障害物回避:障害物を検知して避ける
これらのルールの組み合わせで、鳥や魚のような群れの動きが実現されます。
創発行動の例
| 創発行動 | ルールの組み合わせ | 応用 |
|---|---|---|
| 群れ形成 | 整列+凝集+分離 | 監視、パトロール |
| 経路探索 | 蟻コロニー最適化 | 物流、ネットワーク |
| 集団輸送 | 協調把持+移動 | 大型物体の運搬 |
| 環境探索 | 拡散+情報共有 | 捜索救助、マッピング |
| 自己組織化 | 局所相互作用 | 形状形成、建設 |
通信・協調メカニズム
- 直接通信:無線通信による情報交換
- 間接通信(スティグマジー):環境を介した情報伝達(蟻のフェロモンに相当)
- 暗黙的協調:他ロボットの観測による推論
スウォームロボティクスの主要技術
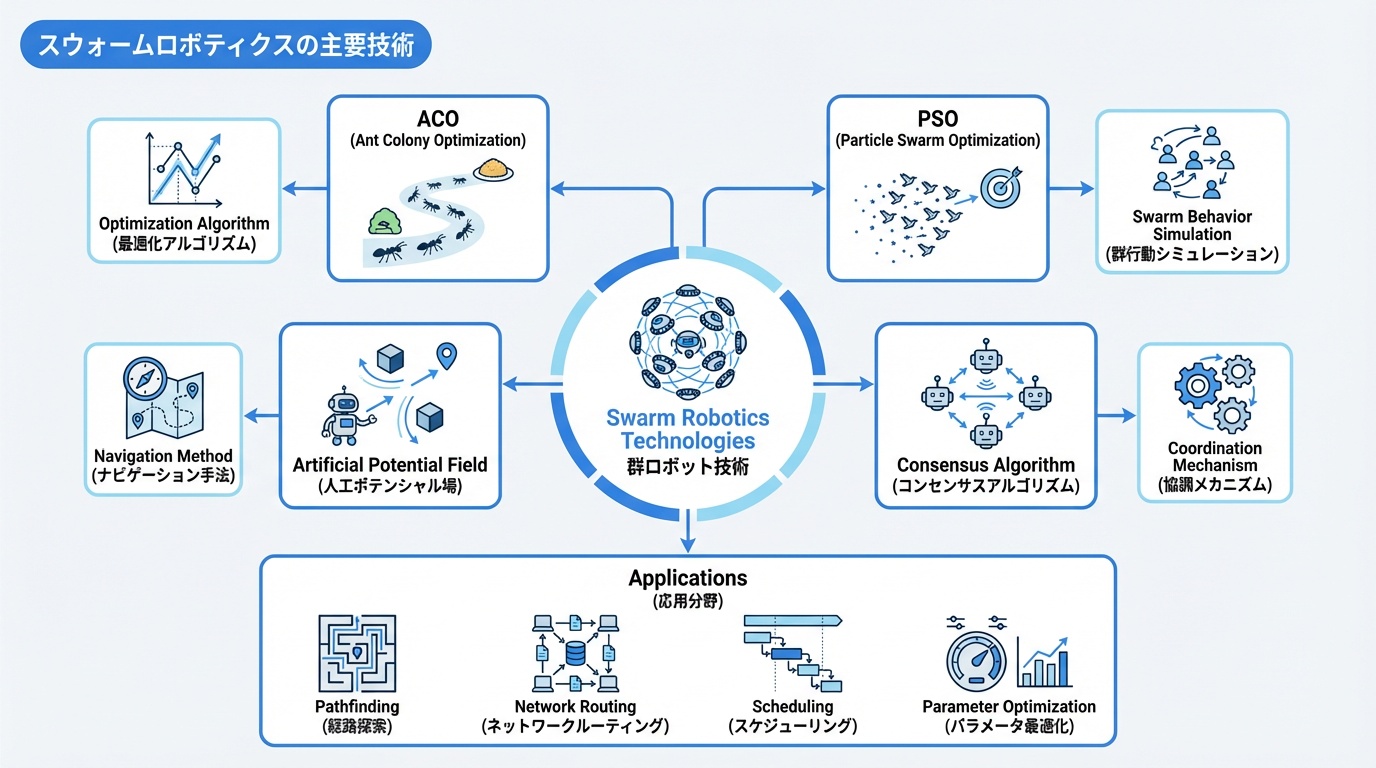
スウォームロボットを実現する主要技術を解説します。
1. 蟻コロニー最適化(ACO)
蟻のフェロモン行動を模倣した最適化アルゴリズムです。
- 経路探索問題の解決
- ネットワークルーティング
- スケジューリング問題
2. 粒子群最適化(PSO)
鳥や魚の群れ行動を模倣した最適化手法です。
- パラメータ最適化
- ロボットの位置決め
- 機械学習のハイパーパラメータ調整
3. 人工ポテンシャル場
仮想的な力場でロボットの動きを制御します。
- 目標への引力、障害物からの斥力
- 群れ形成と維持
- 衝突回避
4. 合意アルゴリズム
分散システムで全体の合意を形成する手法です。
- 群れの方向決定
- リーダー選出
- タスク割り当て
スウォームロボティクスの応用分野
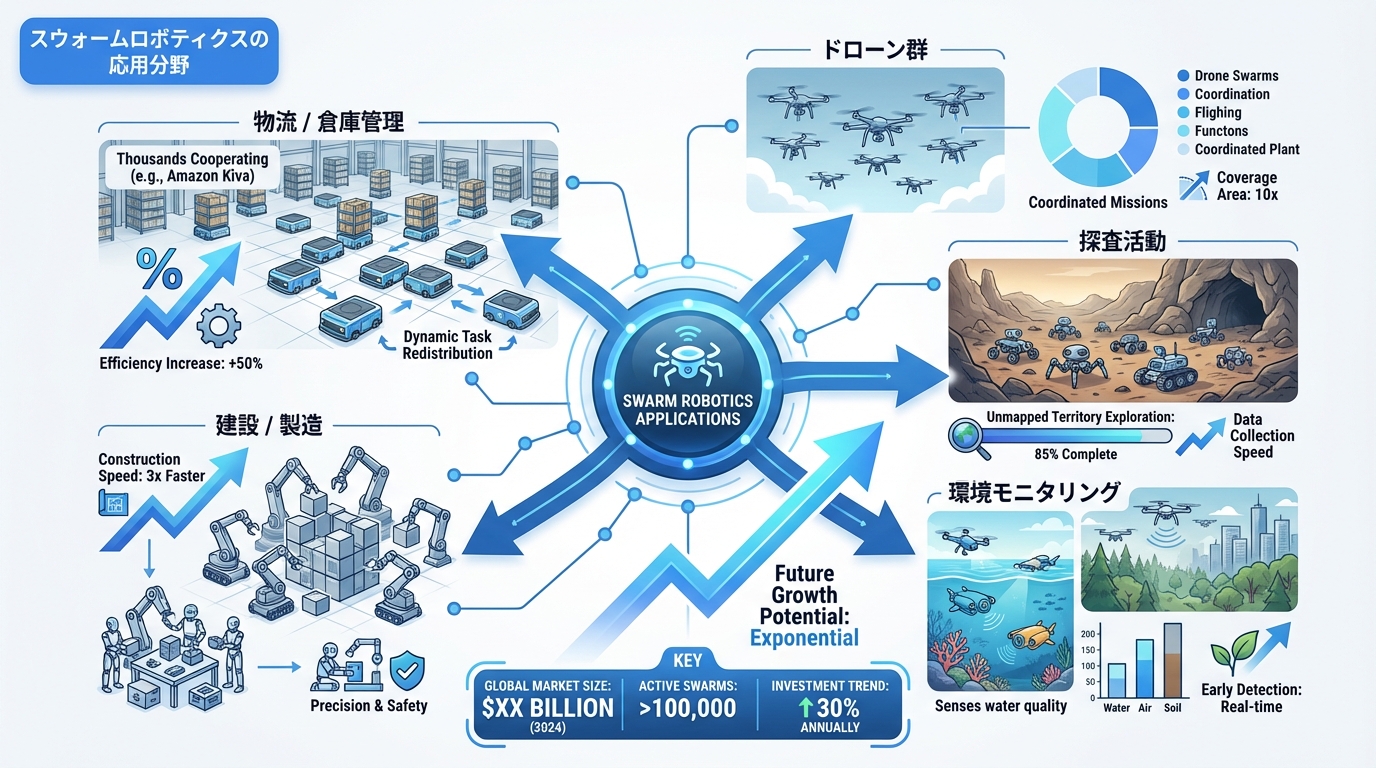
スウォームロボティクスは様々な分野で実用化が進んでいます。
1. 物流・倉庫
多数のロボットが協調して物品を運搬します。
- Amazonの倉庫ロボット(Kiva):数千台が協調動作
- 自動搬送による効率化
- 動的なタスク再配分
倉庫ロボットの多くがスウォーム的アプローチを採用しています。
2. ドローン編隊
複数ドローンの協調飛行は代表的な応用です。
- ライトショー:Intel、EHangなどの大規模編隊
- 農業:広大な農地の協調散布
- 捜索救助:広域の並列探索
- 監視:大規模エリアのカバー
ドローン物流でも協調制御が重要です。
3. 探査・調査
- 海洋調査:水中ロボット群による環境モニタリング
- 宇宙探査:小型探査機群による惑星探査
- 災害調査:被災地の広域マッピング
4. 環境モニタリング
- 汚染源の検出・追跡
- 野生動物のトラッキング
- 気象データ収集
5. 建設・製造
- 協調建設:ハーバードのTERMESプロジェクト
- 自己組立:ロボットによる構造物構築
- 3Dプリント:協調印刷による大型構造物
6. 医療・体内
- マイクロ/ナノロボット群による薬物送達
- 血管内の協調検査・治療
- がん細胞の標的攻撃
代表的な研究プラットフォーム
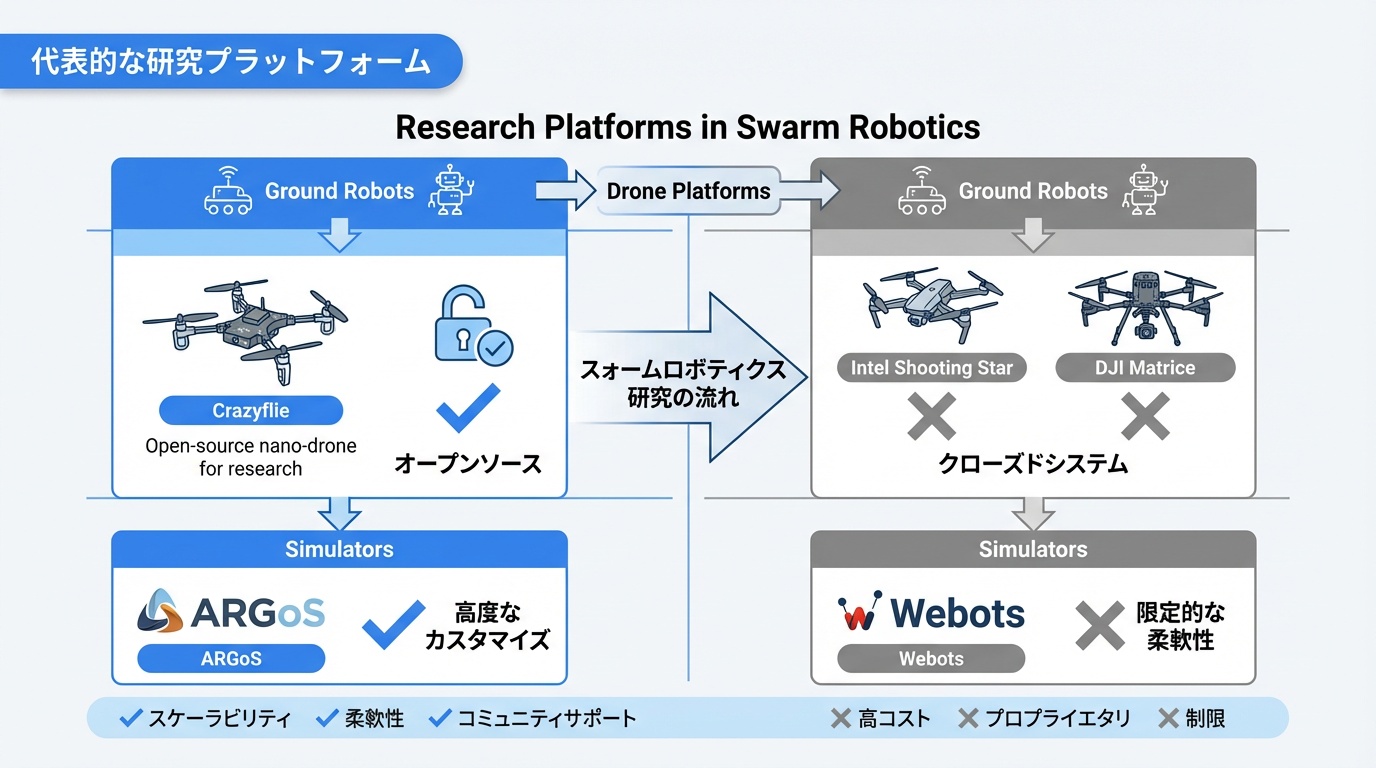
スウォームロボティクス研究で使用される主要なプラットフォームを紹介します。
小型地上ロボット
| 名称 | 開発元 | 特徴 |
|---|---|---|
| Kilobot | ハーバード大学 | 超低コスト、1000台実験 |
| e-puck | EPFL | 教育・研究用、拡張性高 |
| Khepera | K-Team | 高性能、センサー豊富 |
| Thymio | EPFL | 教育向け、低価格 |
ドローンプラットフォーム
- Crazyflie:オープンソース、研究向けナノドローン
- Intel Shooting Star:ライトショー用、数千台運用実績
- DJI Matrice:産業用、SDK対応
シミュレータ
- ARGoS:大規模スウォームシミュレーション
- Webots:汎用ロボットシミュレータ
- Gazebo:ROS統合シミュレータ
スウォームロボティクスの課題と最新研究
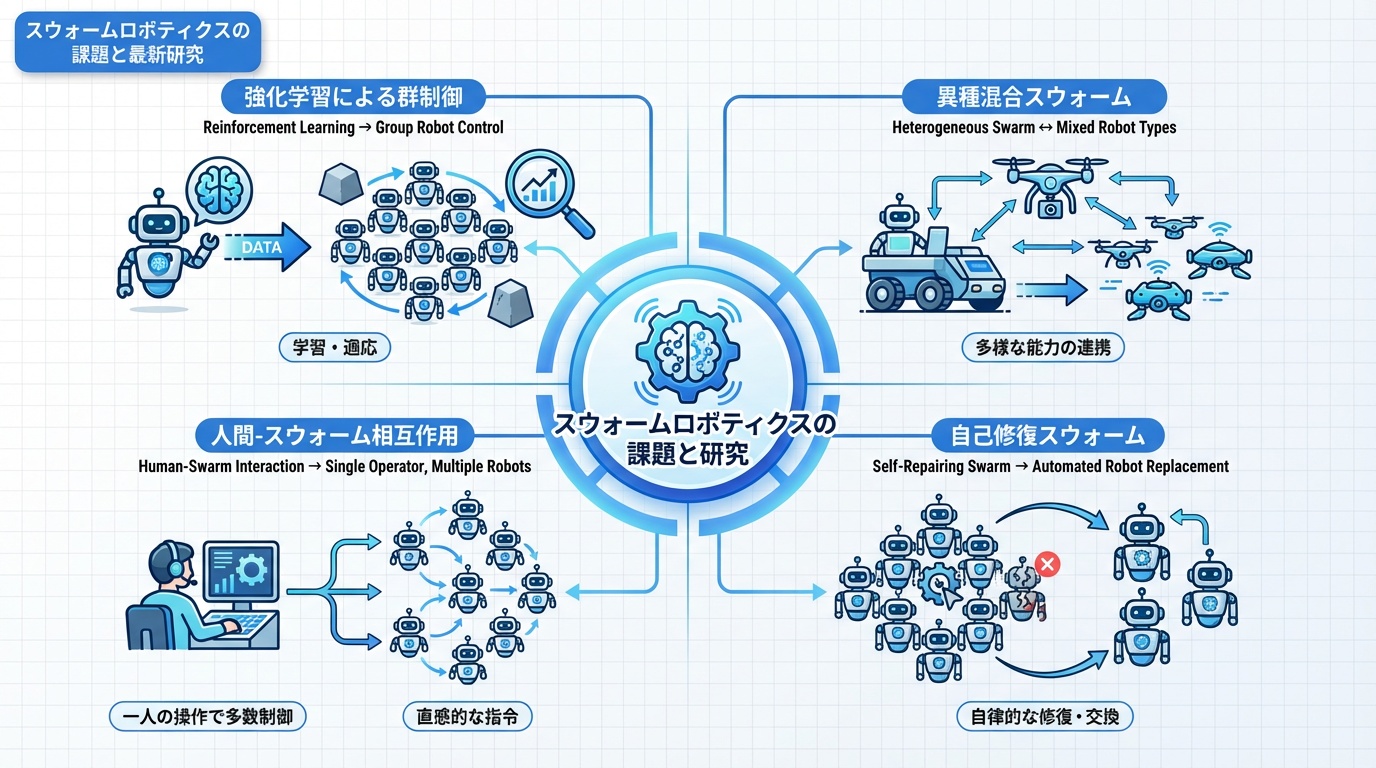
スウォームロボティクスにはまだ解決すべき課題があります。
現在の技術的課題
| 課題 | 詳細 | 研究アプローチ |
|---|---|---|
| スケーラビリティ | 大規模群の制御困難 | 階層的制御、局所ルール改良 |
| 通信制約 | 帯域・遅延の制限 | スティグマジー、圧縮通信 |
| 異種混成 | 異なるロボットの協調 | 役割分担、適応的協調 |
| 予測困難性 | 創発行動の予測 | 数理モデル、機械学習 |
| 屋外環境 | GPS・通信の不安定 | ローカルセンシング強化 |
最新研究動向(2026年)
- 機械学習との融合:強化学習による群れ行動の学習
- ヘテロジニアススウォーム:異種ロボットの混成群
- 人間-スウォームインタラクション:一人で多数ロボットを操作
- 自己修復スウォーム:故障ロボットの自動交換
- 3次元スウォーム:空中・水中の立体編隊
強化学習×ロボットの技術が群ロボット制御にも応用されています。
スウォームロボティクスの将来展望
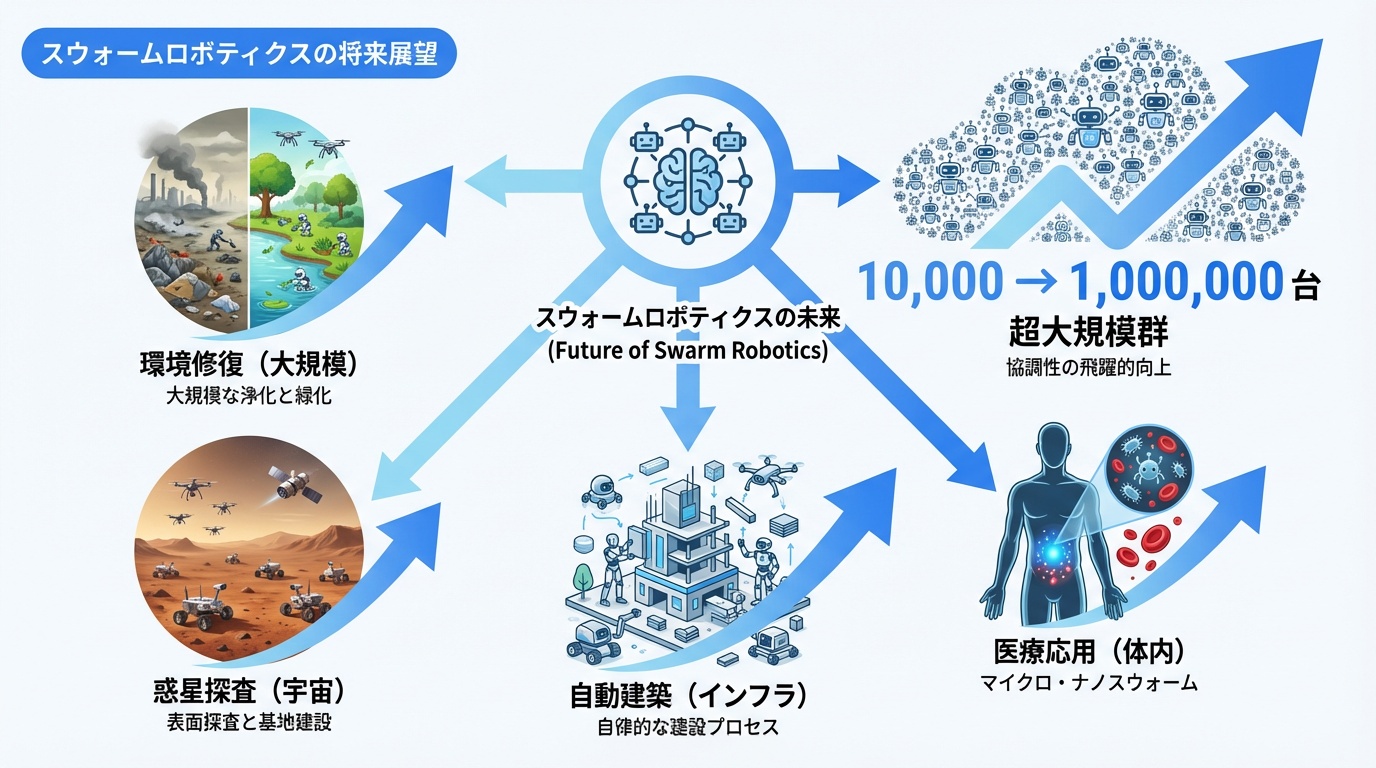
スウォームロボティクスは今後さらに発展が期待されます。
期待される発展
- 超大規模群:数万〜数百万台の協調
- マイクロ/ナノスウォーム:体内医療への応用
- 自律建設:建物・インフラの自動構築
- 宇宙探査:惑星表面の群ロボット探査
- 環境修復:大規模な環境浄化・緑化
社会実装への道筋
- 低コストロボットの量産技術
- 屋外での堅牢な動作
- 安全性と法規制への対応
- 人間との協働インターフェース
まとめ|スウォームロボティクスの可能性
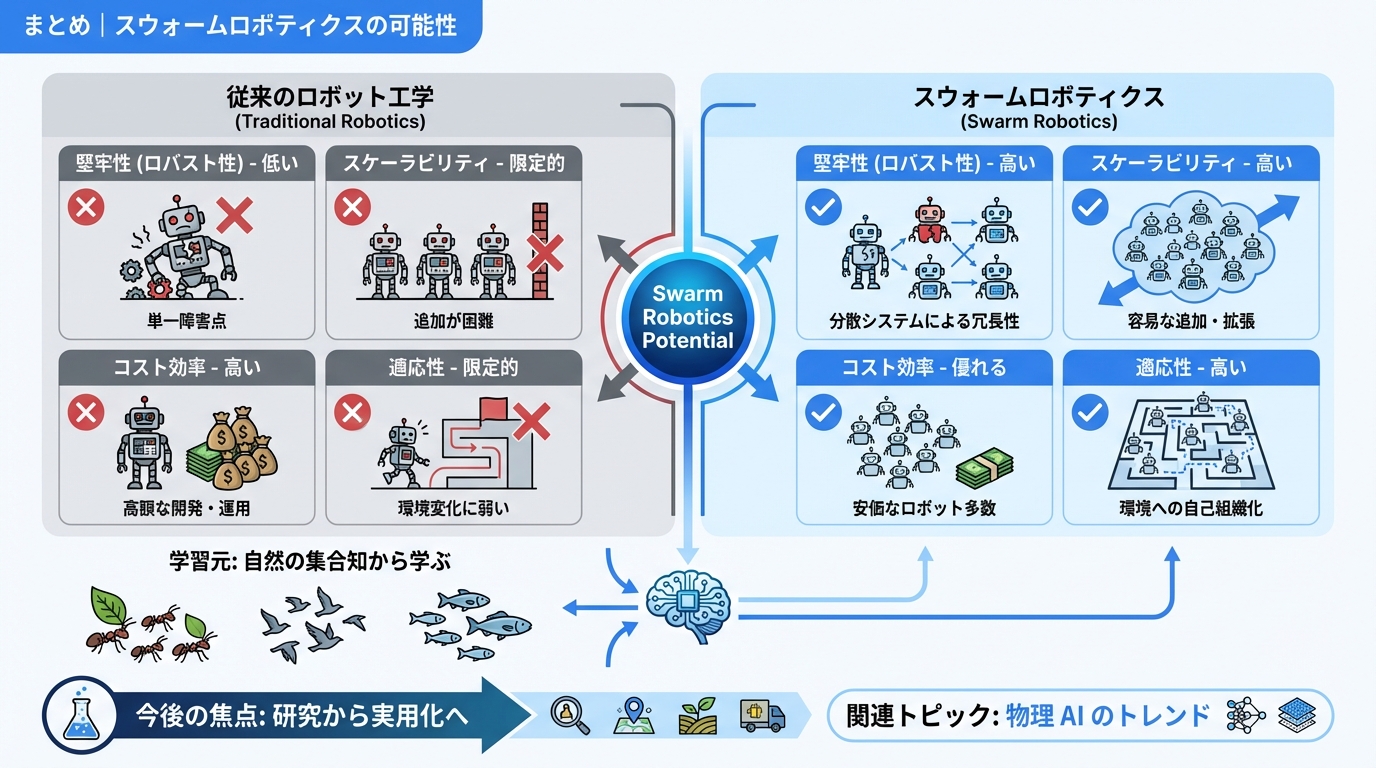
スウォームロボティクスは、自然界の群知能に学び、多数のロボットで複雑なタスクを実現する革新的な技術です。
スウォームロボティクスの利点
- 頑健性:一部故障でも全体は機能
- スケーラビリティ:台数変更に柔軟対応
- コスト効率:シンプルなロボットの活用
- 適応性:環境変化への自己適応
今後の発展に向けて
- 基礎研究と実用化の橋渡し
- 異分野との融合(AI、材料、通信)
- 社会受容性の向上
- 新たな応用分野の開拓
関連記事としてフィジカルAIの動向もご覧ください。
https://ainow.jp/drone-logistics/
https://ainow.jp/warehouse-robot/
https://ainow.jp/agv-amr/
https://ainow.jp/underwater-robot-guide/