
SLAM(Simultaneous Localization and Mapping)は、ロボットが未知の環境を探索しながら地図を作成し、同時に自己位置を推定する技術です。自動運転車、AGV、ドローン、掃除ロボットなど、あらゆる自律移動システムの基盤技術として不可欠です。本記事では、SLAMの基本原理から実装方法、最新動向まで徹底解説します。
SLAMとは?基本概念と重要性

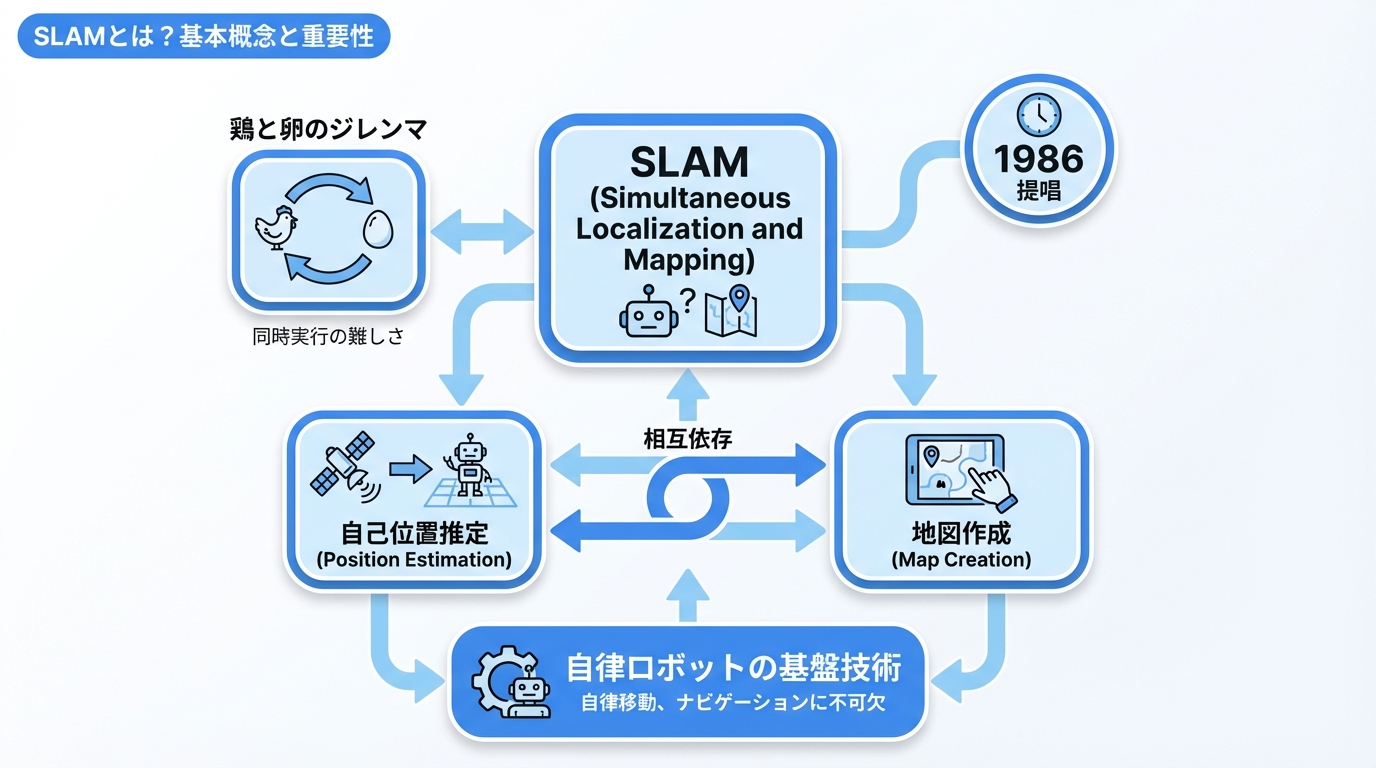
SLAM(スラム)は「Simultaneous Localization and Mapping」の略で、「自己位置推定」と「地図作成」を同時に行う技術です。1986年に概念が提唱され、現在では自律移動の核心技術となっています。
SLAMが解決する「鶏と卵」問題
自律移動ロボットには以下のジレンマがあります:
- 正確な地図を作るには、自分の位置を知る必要がある
- 正確な位置を知るには、地図が必要
SLAMは、この両方を確率的に同時解決する技術です。
SLAMの基本構成要素
| 要素 | 役割 | 具体例 |
|---|---|---|
| センサー | 環境情報の取得 | LiDAR、カメラ、IMU |
| フロントエンド | 特徴抽出・マッチング | 特徴点検出、スキャンマッチング |
| バックエンド | 最適化・推定 | グラフ最適化、フィルタリング |
| ループクロージング | 累積誤差修正 | 場所の再認識 |
| 地図表現 | 環境の記録 | 点群、グリッド、特徴点 |
AGV・AMRはSLAM技術を活用した代表的な自律移動ロボットです。
SLAMの種類と特徴
使用するセンサーや手法によって、SLAMは複数の種類に分類されます。
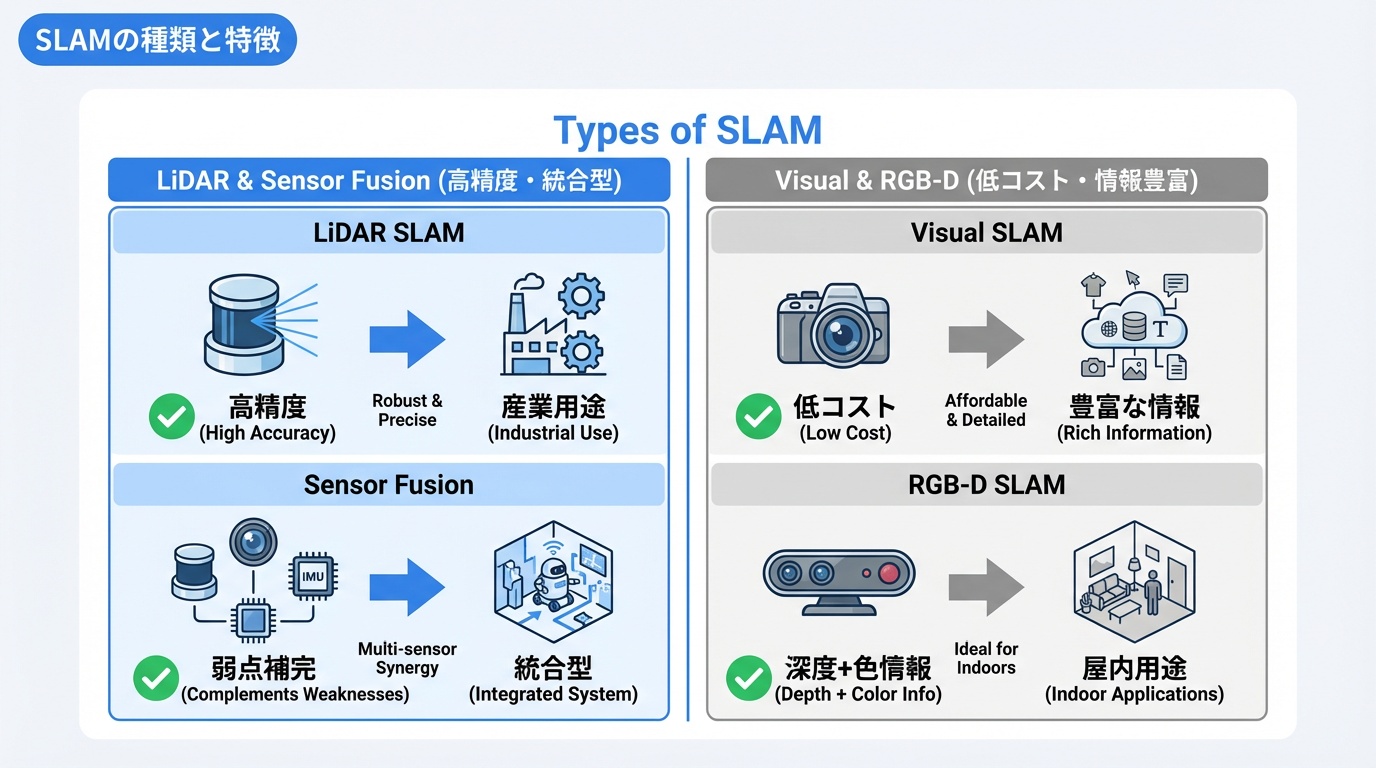
1. LiDAR SLAM
レーザーセンサーで環境をスキャンする方式です。最も精度が高く、産業用途で広く使われています。
| 項目 | 内容 |
|---|---|
| 精度 | 非常に高い(cm級) |
| 環境 | 屋内外両対応 |
| 照明条件 | 影響なし(暗所可) |
| コスト | 高い(数十万〜数百万円) |
| 代表手法 | Cartographer、LOAM、LIO-SAM |
2. Visual SLAM(vSLAM)
カメラ画像を使用する方式です。低コストで豊富な情報が得られます。
| 項目 | 内容 |
|---|---|
| 精度 | 中〜高(環境依存) |
| 環境 | 特徴が多い環境向け |
| 照明条件 | 影響大(暗所苦手) |
| コスト | 低い(カメラのみ) |
| 代表手法 | ORB-SLAM3、RTAB-Map、VINS-Fusion |
3. RGB-D SLAM
深度カメラ(Kinect、RealSense等)を使用する方式です。
- 色情報と深度情報を組み合わせ
- 屋内向け(有効距離に制限)
- 代表手法:RTAB-Map、ElasticFusion
4. センサーフュージョンSLAM
複数センサーを統合する最新のアプローチです。
- LiDAR + カメラ + IMU を統合
- 各センサーの弱点を補完
- 自動運転車で主流
- 代表手法:LVI-SAM、FAST-LIO2
SLAMの主要アルゴリズム解説

代表的なSLAMアルゴリズムの仕組みを解説します。
フィルタベースSLAM
確率的フィルタを用いて逐次的に推定を更新します。
- EKF-SLAM:拡張カルマンフィルタを使用、計算量大
- Particle Filter SLAM:パーティクルで分布を表現
- FastSLAM:効率的なパーティクル更新
グラフベースSLAM
ポーズと観測をグラフ構造で表現し、最適化問題として解きます。現在の主流です。
- ノード:ロボットのポーズ(位置・姿勢)
- エッジ:ポーズ間の制約(オドメトリ、観測)
- 最適化:グラフ全体の整合性を最大化
代表的なオープンソースSLAM
| 名称 | センサー | 特徴 | 用途 |
|---|---|---|---|
| Cartographer | 2D/3D LiDAR | Google開発、高精度 | 屋内AGV |
| ORB-SLAM3 | カメラ/RGB-D | 特徴点ベース、堅牢 | 研究、AR |
| RTAB-Map | RGB-D/LiDAR | 多センサー対応 | 汎用 |
| LIO-SAM | LiDAR+IMU | リアルタイム、高精度 | 自動運転 |
| VINS-Fusion | カメラ+IMU | VIO高精度 | ドローン |
SLAMの応用分野

SLAMは様々な自律移動システムで活用されています。
1. 自動運転車
高精度3D地図の作成と自己位置推定に使用されています。
- LiDAR SLAMによる高精度マッピング
- HDマップとのローカライゼーション
- GPS非依存の自己位置推定
自動運転技術の基盤となっています。
2. 物流・倉庫ロボット
倉庫内の自律走行に不可欠です。
- 施設全体の地図自動生成
- 動的障害物への対応
- フリート全体での地図共有
倉庫ロボットで広く採用されています。
3. 家庭用ロボット
掃除ロボットの主要技術として普及しています。
- 部屋のレイアウト学習
- 効率的な掃除経路計画
- 充電ステーションへの自動帰還
4. ドローン
GPS不可環境での自律飛行に活用されています。
- 屋内・トンネル内の飛行
- 点検・調査ミッション
- Visual-Inertial Odometry(VIO)
5. AR/VR
拡張現実の位置合わせ技術として使用されています。
- Apple ARKit / Google ARCore
- Meta Quest の Inside-Out トラッキング
- Microsoft HoloLens の空間認識
SLAM実装の実践ガイド
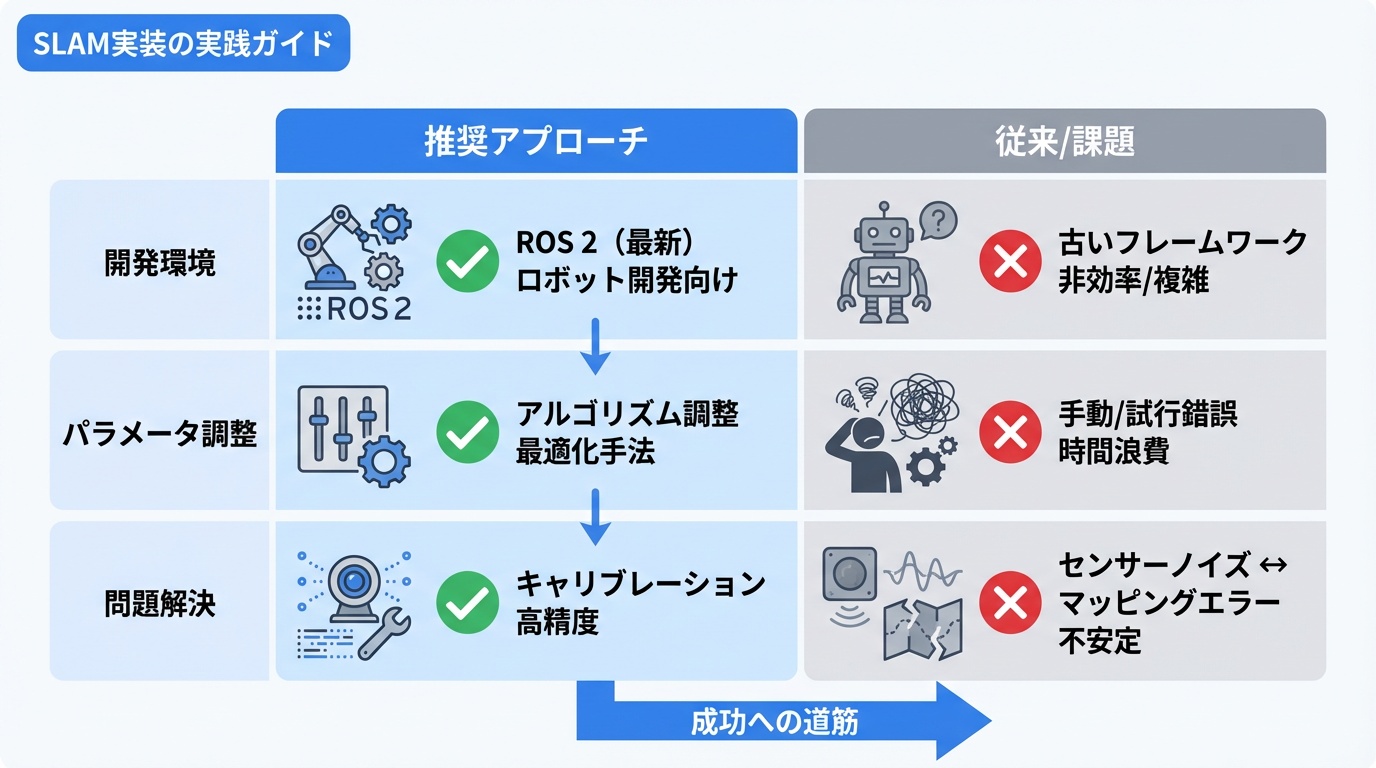
SLAMを実際に動かすための実践的なガイドです。
開発環境の構築(ROS 2)
# ROS 2 Humble インストール(Ubuntu 22.04)
sudo apt install ros-humble-desktop
# SLAM関連パッケージ
sudo apt install ros-humble-slam-toolbox
sudo apt install ros-humble-nav2-bringup
sudo apt install ros-humble-cartographer-ros主要パラメータ調整
| パラメータ | 影響 | 調整指針 |
|---|---|---|
| 解像度 | 地図の細かさ | 5cm(屋内)〜20cm(屋外) |
| スキャン間隔 | 処理負荷・精度 | 10Hz程度が一般的 |
| ループ閾値 | 誤検出・見逃し | 環境に応じて調整 |
| 最大距離 | 有効範囲 | センサー特性に合わせる |
典型的な問題と対策
| 問題 | 原因 | 対策 |
|---|---|---|
| ドリフト(累積誤差) | 観測ノイズの蓄積 | ループクロージング強化 |
| 特徴不足 | 単調な環境 | マルチセンサー統合 |
| 動的障害物 | 人や車両の移動 | 動体除去フィルタ |
| 計算負荷 | 大規模環境 | サブマップ分割 |
ROS入門でロボット開発の基礎を学べます。
SLAMの最新研究動向(2026年)
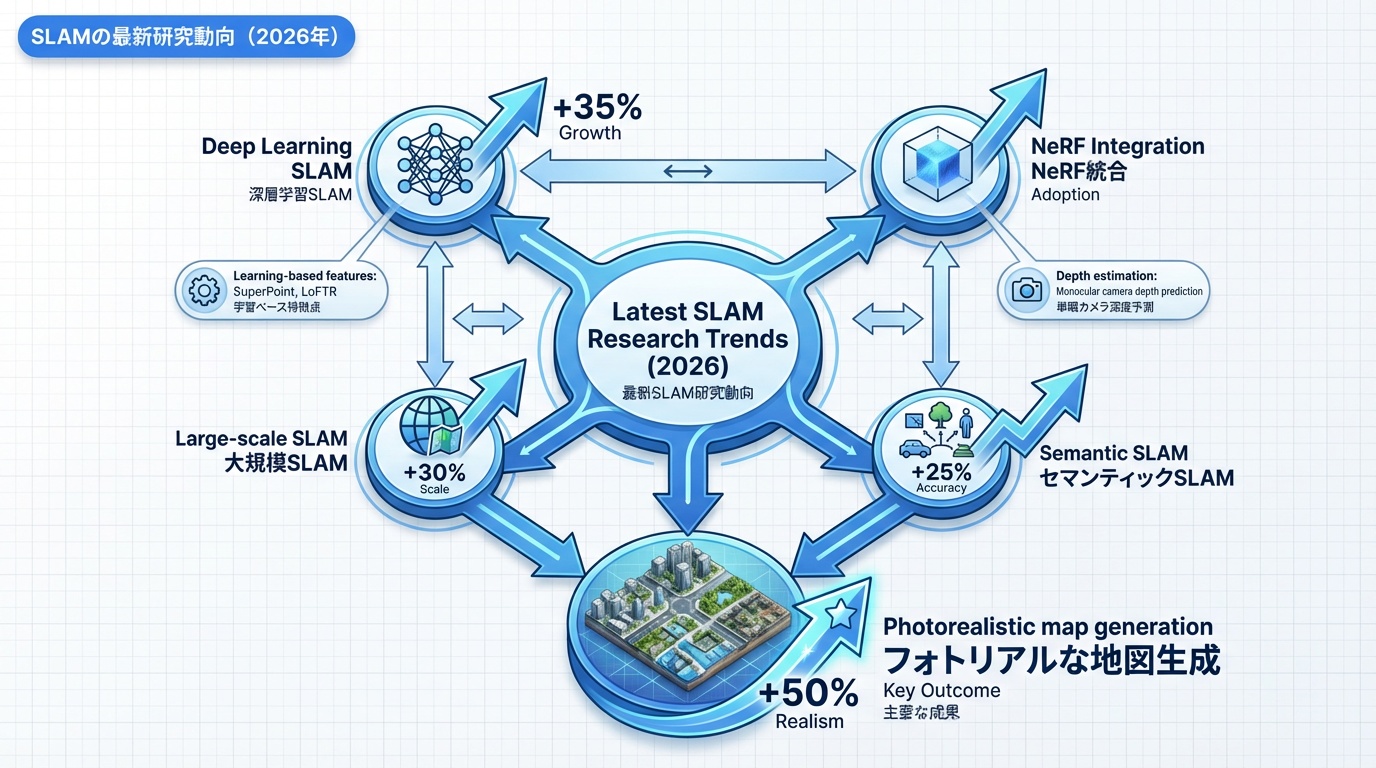
SLAM技術は急速に進化しています。最新の研究トレンドを紹介します。
1. ディープラーニングSLAM
ニューラルネットワークを活用した新しいアプローチです。
- 学習ベース特徴:SuperPoint、LoFTR
- 深度推定:単眼カメラから深度を推定
- End-to-End SLAM:全処理をNNで実現
2. Neural Radiance Fields(NeRF)との融合
NeRFによる高品質な3D表現とSLAMの統合が研究されています。
- フォトリアルな地図生成
- 任意視点でのレンダリング
- NICE-SLAM、iMAP等の手法
3. 大規模環境SLAM
都市規模の環境に対応する技術が発展しています。
- 階層的地図表現
- 分散SLAM(複数ロボット協調)
- クラウドSLAM
4. セマンティックSLAM
物体認識と統合し、意味理解を含む地図を作成します。
- 「机」「椅子」などのラベル付き地図
- 物体レベルのSLAM
- タスク指向のナビゲーション
Embodied AIとの統合も進んでいます。
まとめ|SLAM技術の重要性と今後
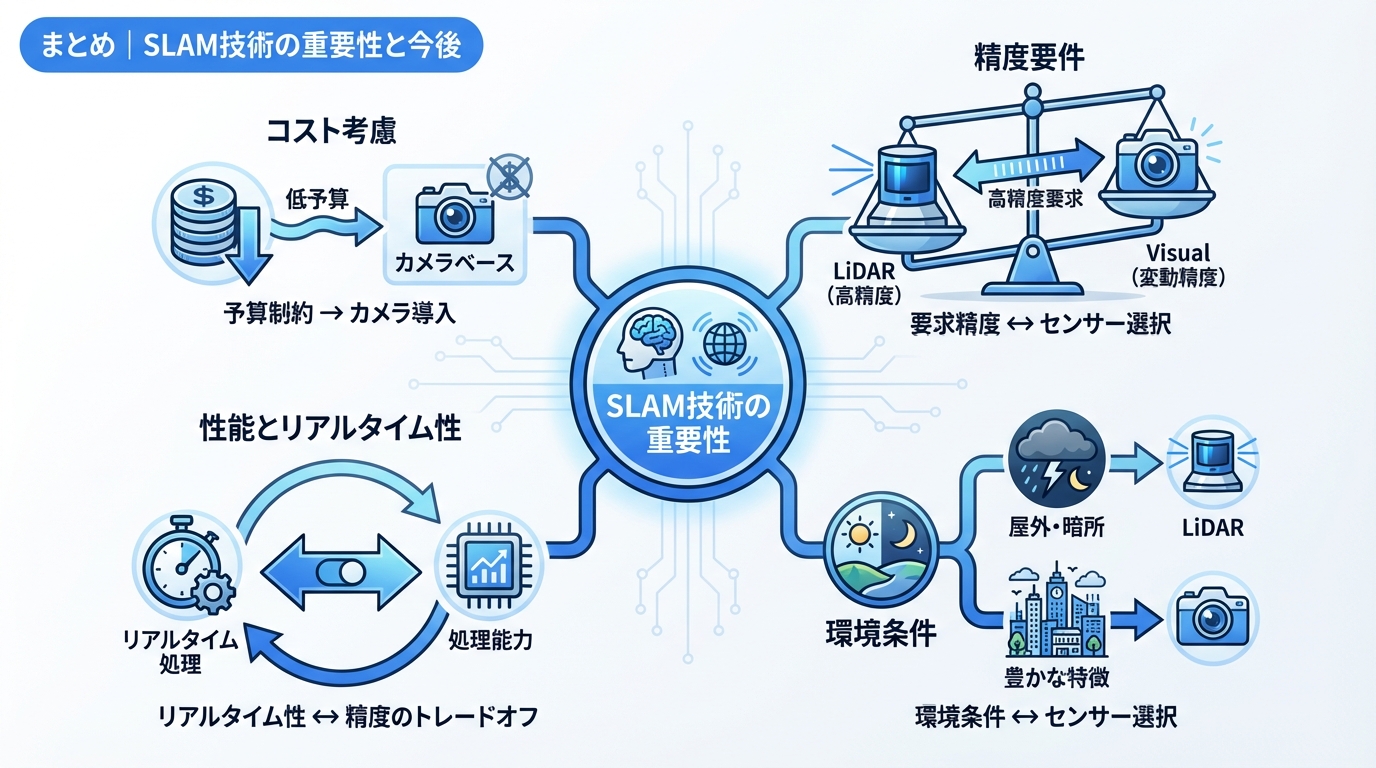
SLAMは自律移動ロボットの「目」と「脳」として不可欠な技術です。
SLAM選定のポイント
- 精度要件:cm級が必要ならLiDAR、それ以外はVisual
- 環境条件:屋外・暗所ならLiDAR、特徴豊富ならカメラ
- コスト:低予算ならカメラベース
- リアルタイム性:処理能力と精度のトレードオフ
今後の展望
- ディープラーニングとの融合による高性能化
- センサーの低価格化による普及拡大
- 大規模環境・長期運用への対応
- セマンティック理解との統合
関連記事としてフィジカルAIの動向もご覧ください。
https://ainow.jp/agv-amr/
https://ainow.jp/autonomous-driving/
https://ainow.jp/warehouse-robot/
https://ainow.jp/robot-sensor-guide/