
ロボットシミュレーションは、実機を使わずにロボットの動作を検証・開発するための技術です。安全かつ効率的な開発を可能にし、特にSim-to-Real(シミュレーションから実機への転用)において重要な役割を果たします。本記事では、主要シミュレータの比較から実践的な活用法まで徹底解説します。
ロボットシミュレーションとは?
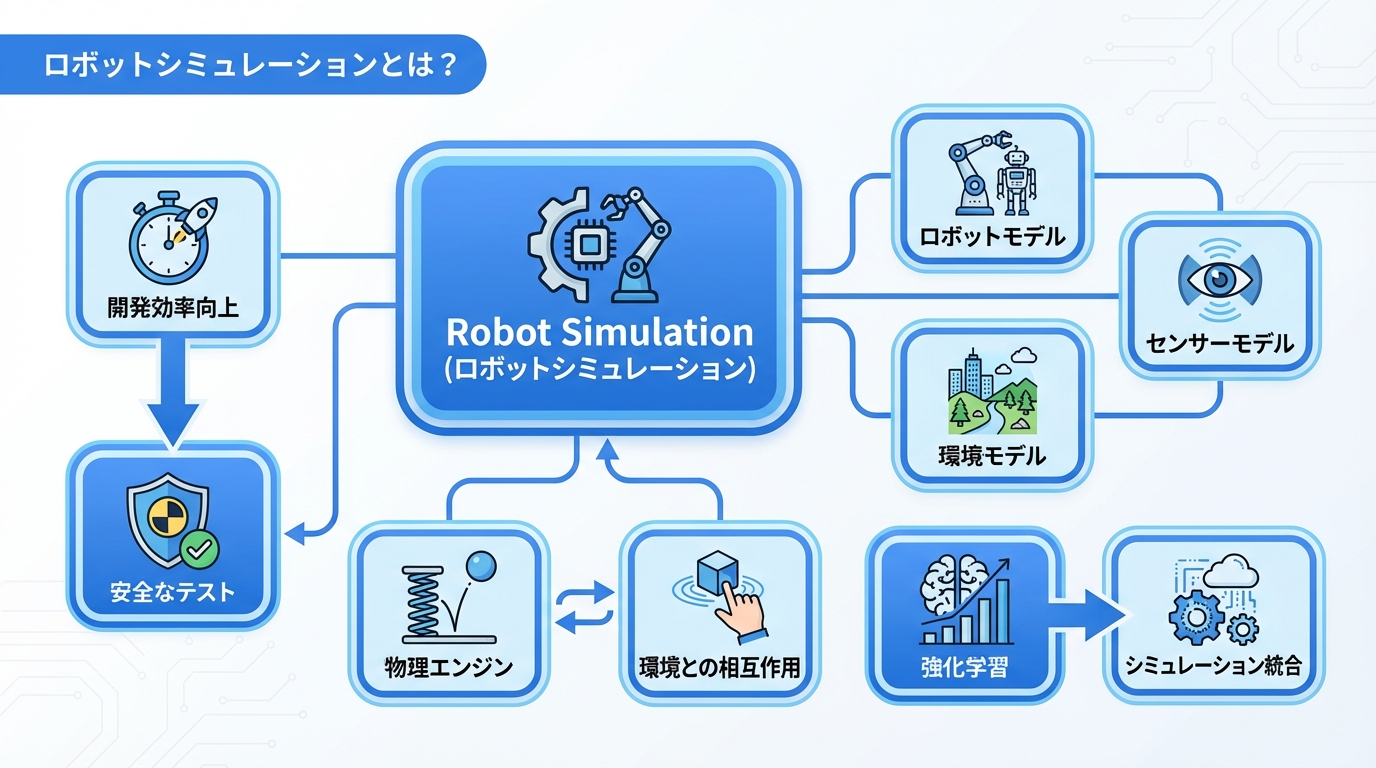

ロボットシミュレーションは、物理エンジンを用いてロボットと環境の相互作用を仮想的に再現する技術です。開発効率の向上と安全なテストを実現します。
シミュレーションのメリット
| メリット | 説明 | 具体例 |
|---|---|---|
| 安全性 | 危険な動作も安全にテスト | 衝突テスト、限界動作 |
| 効率性 | 実時間の数百倍で実行可能 | 強化学習の大量試行 |
| 再現性 | 同一条件を何度でも再現 | バグ再現、比較実験 |
| コスト削減 | 実機なしで開発可能 | プロトタイピング |
| 並列化 | 複数インスタンスを同時実行 | パラメータ探索 |
シミュレーションの構成要素
- 物理エンジン:剛体力学、接触、摩擦の計算
- レンダリング:視覚的な描画、センサーシミュレーション
- ロボットモデル:URDF/SDF形式のロボット記述
- 環境モデル:床、壁、物体などの3Dモデル
- センサーモデル:カメラ、LiDAR、IMUなどの模擬
強化学習×ロボットではシミュレーションが学習の基盤となります。
主要シミュレータ比較
ロボット開発で使用される主要なシミュレータを比較します。
シミュレータ一覧
| シミュレータ | 開発元 | 物理エンジン | 主な用途 | ライセンス |
|---|---|---|---|---|
| Gazebo | Open Robotics | ODE, Bullet, DART | ROS連携、研究 | Apache 2.0 |
| Isaac Sim | NVIDIA | PhysX | AI、Sim-to-Real | 商用(無料枠あり) |
| PyBullet | Erwin Coumans | Bullet | 強化学習、研究 | zlib |
| MuJoCo | DeepMind | MuJoCo | 強化学習、研究 | Apache 2.0 |
| CoppeliaSim | Coppelia Robotics | ODE, Bullet, Vortex | 教育、産業 | 商用/教育無料 |
| Webots | Cyberbotics | ODE | 教育、競技 | Apache 2.0 |
用途別おすすめ
| 用途 | 推奨シミュレータ | 理由 |
|---|---|---|
| ROS開発 | Gazebo | ROS標準、豊富なプラグイン |
| 強化学習 | Isaac Sim, MuJoCo | 高速、GPU並列 |
| Sim-to-Real | Isaac Sim | ドメインランダマイゼーション |
| 教育・入門 | PyBullet, Webots | 簡単、ドキュメント充実 |
| マニピュレーション | MuJoCo, Isaac Sim | 接触の精度 |
Gazebo:ROS標準シミュレータ
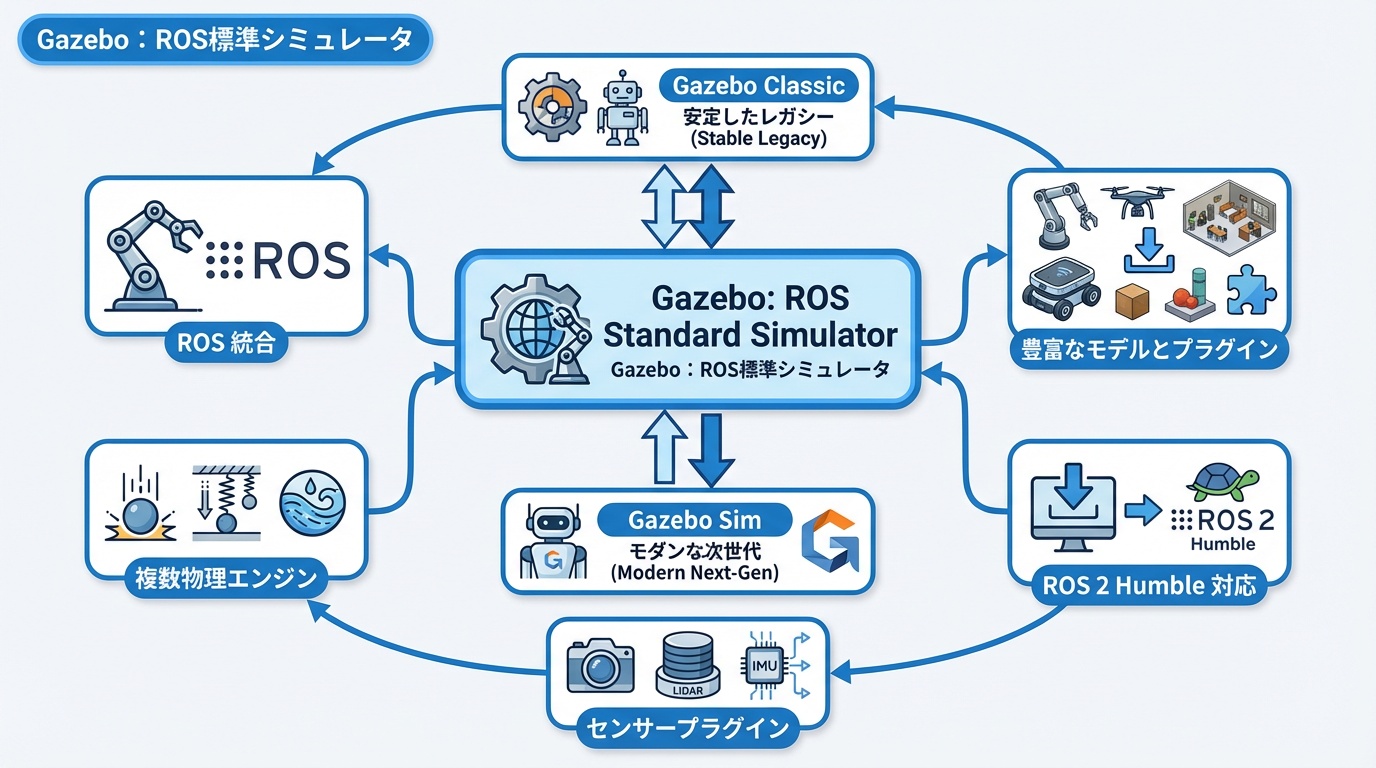
Gazeboは、ROSエコシステムで最も広く使われるオープンソースシミュレータです。Gazebo Classic(Gazebo 11まで)とGazebo Sim(旧Ignition Gazebo)の2系統があります。
Gazeboの特徴
- ROS統合:ros2_controlとシームレスに連携
- 複数物理エンジン:ODE、Bullet、DART、Simbodyを切替可能
- センサープラグイン:カメラ、LiDAR、IMUなど豊富
- SDF形式:詳細なロボット・環境記述
- コミュニティ:豊富なモデル、プラグイン
Gazebo Simのインストール(ROS 2 Humble)
# Ubuntu 22.04
sudo apt install ros-humble-ros-gz
# 起動テスト
ros2 launch ros_gz_sim gz_sim.launch.pyGazeboの制限
- GPU並列化が限定的
- フォトリアルなレンダリングは弱い
- 大規模シーンでパフォーマンス低下
ROS入門でGazeboの基本的な使い方を学べます。
NVIDIA Isaac Sim:AIロボット開発の最前線
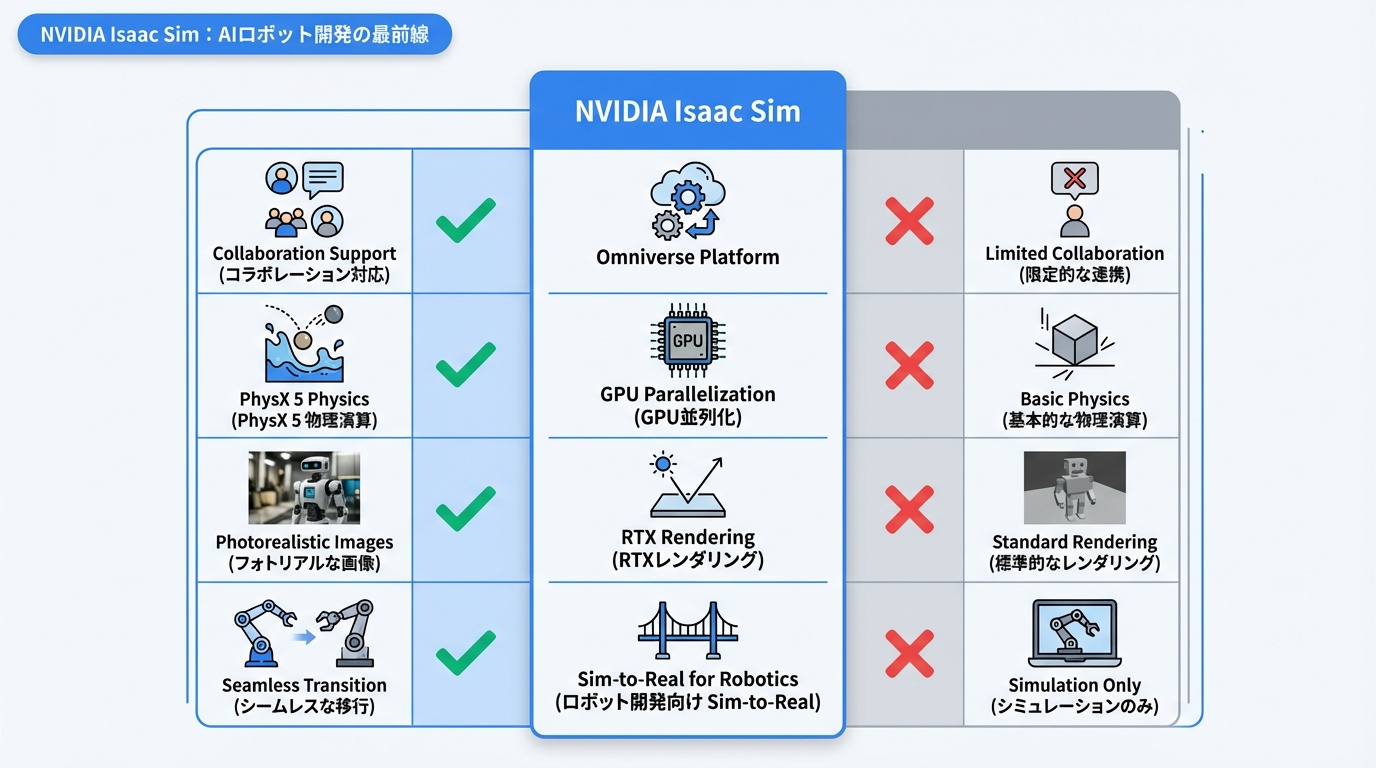
Isaac Simは、NVIDIAが開発するフォトリアルなロボットシミュレータです。GPU並列化とAI統合に優れ、Sim-to-Realの最有力プラットフォームです。
Isaac Simの特徴
- Omniverse基盤:USD形式、コラボレーション対応
- PhysX 5:GPU並列物理演算
- RTXレンダリング:フォトリアルな画像生成
- ドメインランダマイゼーション:Sim-to-Real用の自動変動
- ROS 2連携:ネイティブブリッジ
- Isaac Lab:強化学習フレームワーク統合
Isaac Simの要件
| 項目 | 最小要件 | 推奨要件 |
|---|---|---|
| GPU | RTX 2070 | RTX 3080以上 |
| VRAM | 8GB | 12GB以上 |
| RAM | 32GB | 64GB |
| OS | Ubuntu 20.04/22.04 | Ubuntu 22.04 |
Isaac Simのユースケース
- 強化学習による歩行・マニピュレーション学習
- 合成データ生成(コンピュータビジョン)
- デジタルツイン(工場シミュレーション)
- 自動運転シミュレーション
NVIDIA GR00TはIsaac Simを活用したヒューマノイド開発プラットフォームです。
PyBullet・MuJoCo:強化学習向け軽量シミュレータ
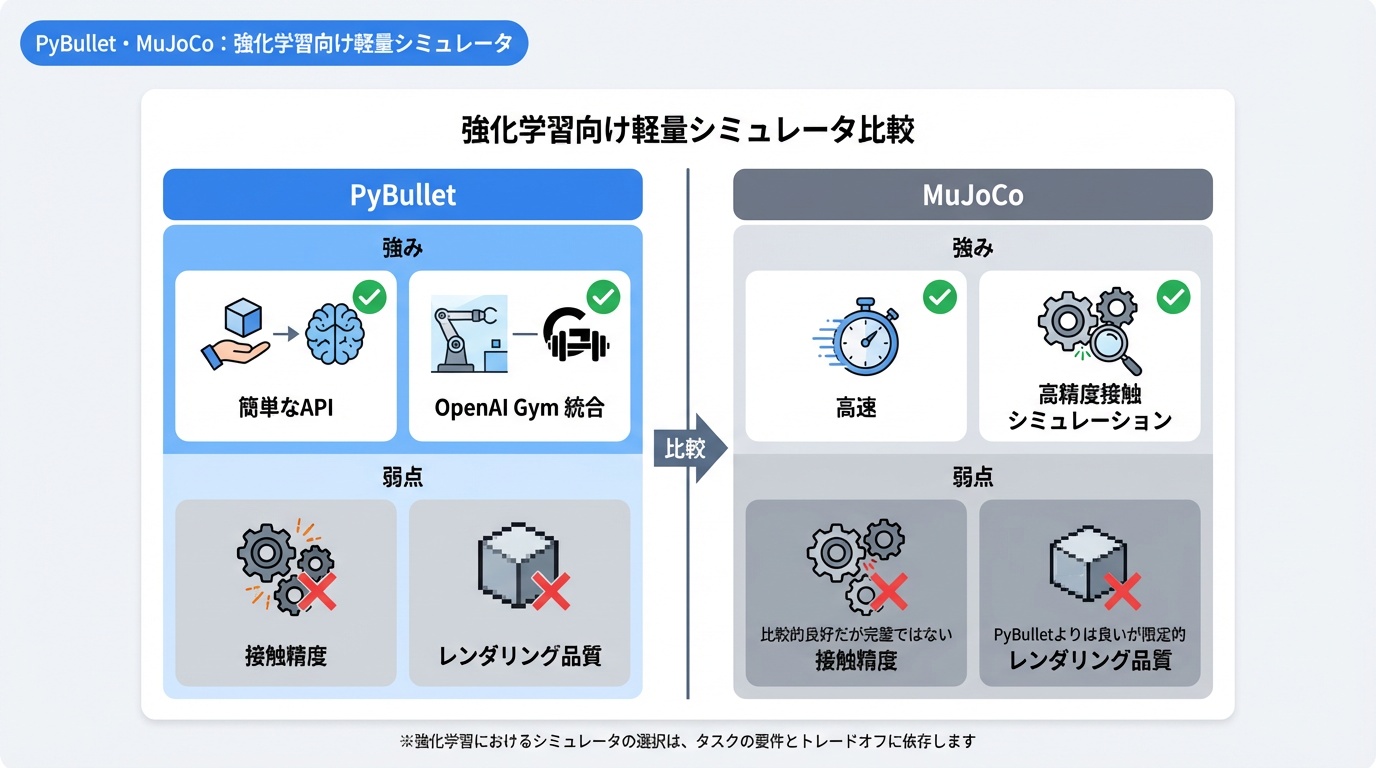
PyBulletとMuJoCoは、強化学習研究で広く使われる軽量シミュレータです。
PyBullet
- 特徴:Pythonから直接操作、軽量、入門に最適
- 物理エンジン:Bullet Physics
- 強み:簡単なAPI、OpenAI Gym統合
- 弱み:接触の精度、レンダリング品質
import pybullet as p
import pybullet_data
p.connect(p.GUI)
p.setAdditionalSearchPath(pybullet_data.getDataPath())
p.loadURDF("plane.urdf")
p.loadURDF("r2d2.urdf", [0, 0, 1])MuJoCo
- 特徴:高速・高精度な接触シミュレーション
- 物理エンジン:独自(Minimal Coordinates)
- 強み:接触の安定性、微分可能物理
- 弱み:学習コスト、独自形式(MJCF)
PyBullet vs MuJoCo
| 項目 | PyBullet | MuJoCo |
|---|---|---|
| 速度 | 速い | 非常に速い |
| 接触精度 | 中 | 高 |
| 学習コスト | 低 | 中 |
| ドキュメント | 充実 | 充実 |
| RL統合 | Gym | Gymnasium, dm_control |
Sim-to-Real:シミュレーションから実機へ
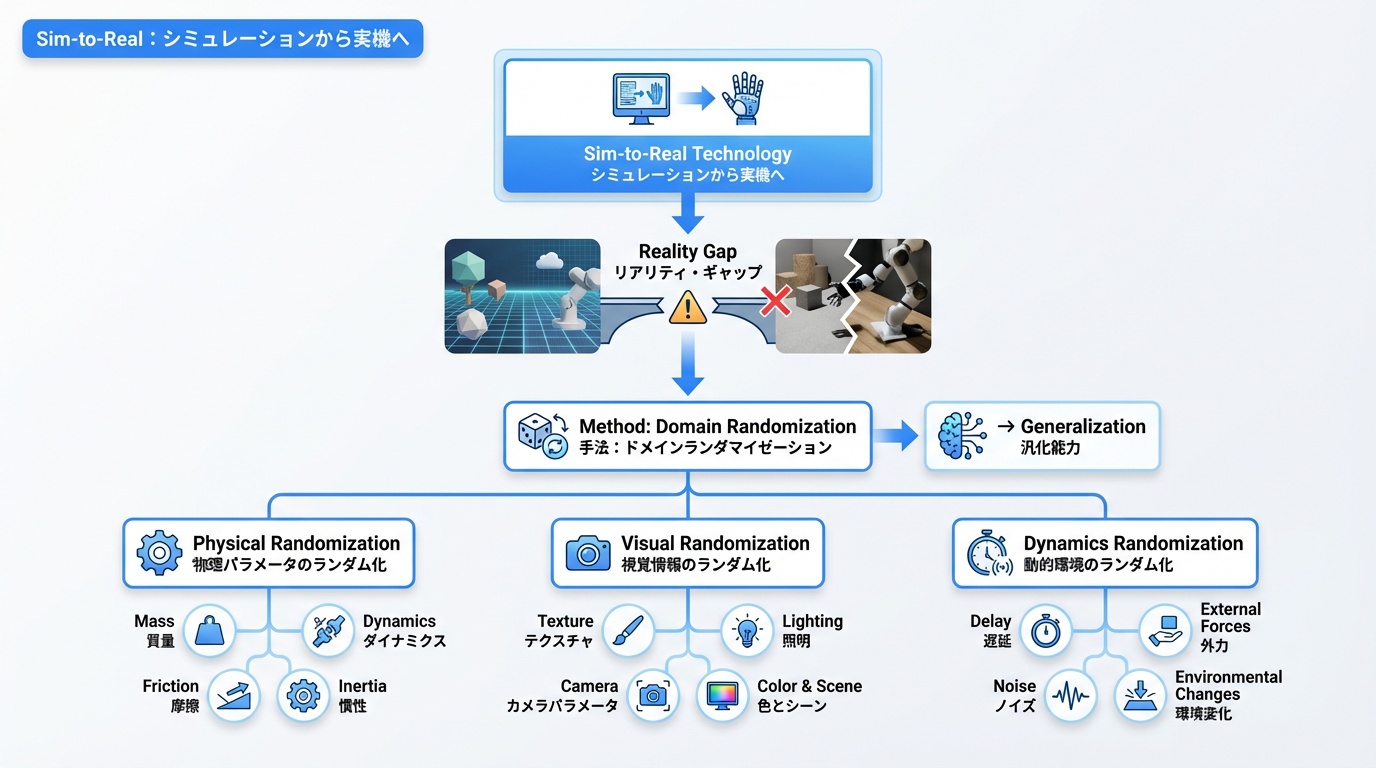
Sim-to-Realは、シミュレーションで学習・検証した結果を実機に転用する技術です。Reality Gap(現実とのギャップ)を埋めることが課題です。
Reality Gapの原因
| ギャップの種類 | 説明 | 対策 |
|---|---|---|
| 物理パラメータ | 摩擦、質量の誤差 | System ID、ドメインランダマイゼーション |
| センサーノイズ | 実センサーのノイズ | ノイズ注入、センサーモデル改善 |
| アクチュエータ | 遅延、非線形性 | アクチュエータモデル、遅延注入 |
| 視覚ギャップ | テクスチャ、照明の違い | ドメインランダマイゼーション |
ドメインランダマイゼーション
シミュレーション中に物理パラメータや視覚要素をランダムに変動させ、実環境への汎化を促す手法です。
- 物理ランダマイゼーション:質量、摩擦、反発係数
- 視覚ランダマイゼーション:テクスチャ、照明、カメラ位置
- ダイナミクスランダマイゼーション:遅延、ノイズ、外乱
強化学習×ロボットでSim-to-Realの詳細を解説しています。
シミュレーション開発の実践ガイド

シミュレーション環境の構築から活用までの実践的なガイドです。
ロボットモデルの作成
| 形式 | 使用シミュレータ | 特徴 |
|---|---|---|
| URDF | Gazebo, PyBullet, MuJoCo | ROS標準、シンプル |
| SDF | Gazebo | URDFより詳細 |
| MJCF | MuJoCo | MuJoCo専用、高機能 |
| USD | Isaac Sim | Omniverse標準、コラボ向け |
開発ワークフロー
- モデル作成:CADからURDF/USD生成
- 基本動作確認:関節制御、センサー確認
- アルゴリズム開発:制御、計画、学習
- 大規模検証:多数のシナリオでテスト
- Sim-to-Real:実機での検証・調整
ベストプラクティス
- 実機パラメータを可能な限り正確に測定
- センサーノイズモデルを実測から作成
- ドメインランダマイゼーションを積極活用
- シミュレーションと実機で同じコードを使用
- バージョン管理でモデルを管理
シミュレーションの最新動向(2026年)
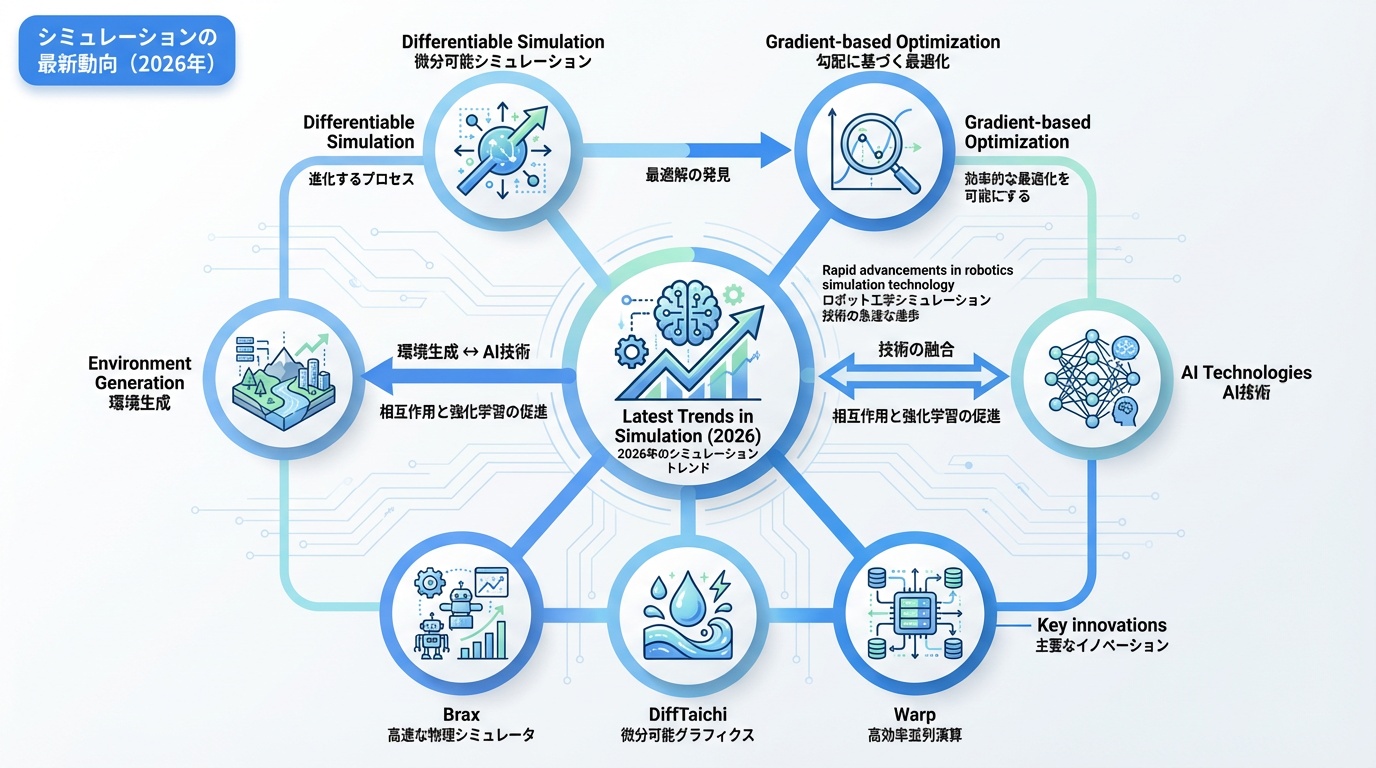
ロボットシミュレーション技術は急速に進化しています。
1. 微分可能シミュレーション
物理シミュレーションを微分可能にし、勾配ベースの最適化を可能にする技術です。
- Brax(Google):JAXベースの高速シミュレータ
- DiffTaichi:微分可能物理プログラミング
- Warp(NVIDIA):GPU微分可能シミュレーション
2. 生成AIによる環境生成
LLMや画像生成AIを活用して、シミュレーション環境を自動生成する研究が進んでいます。
- テキストから3D環境生成
- プロシージャル環境生成
- リアルな物体・テクスチャ生成
3. クラウドシミュレーション
クラウド上で大規模な並列シミュレーションを実行するサービスが普及しています。
- AWS RoboMaker
- NVIDIA Omniverse Cloud
- Google Cloud Robotics
まとめ|シミュレータ選定のポイント
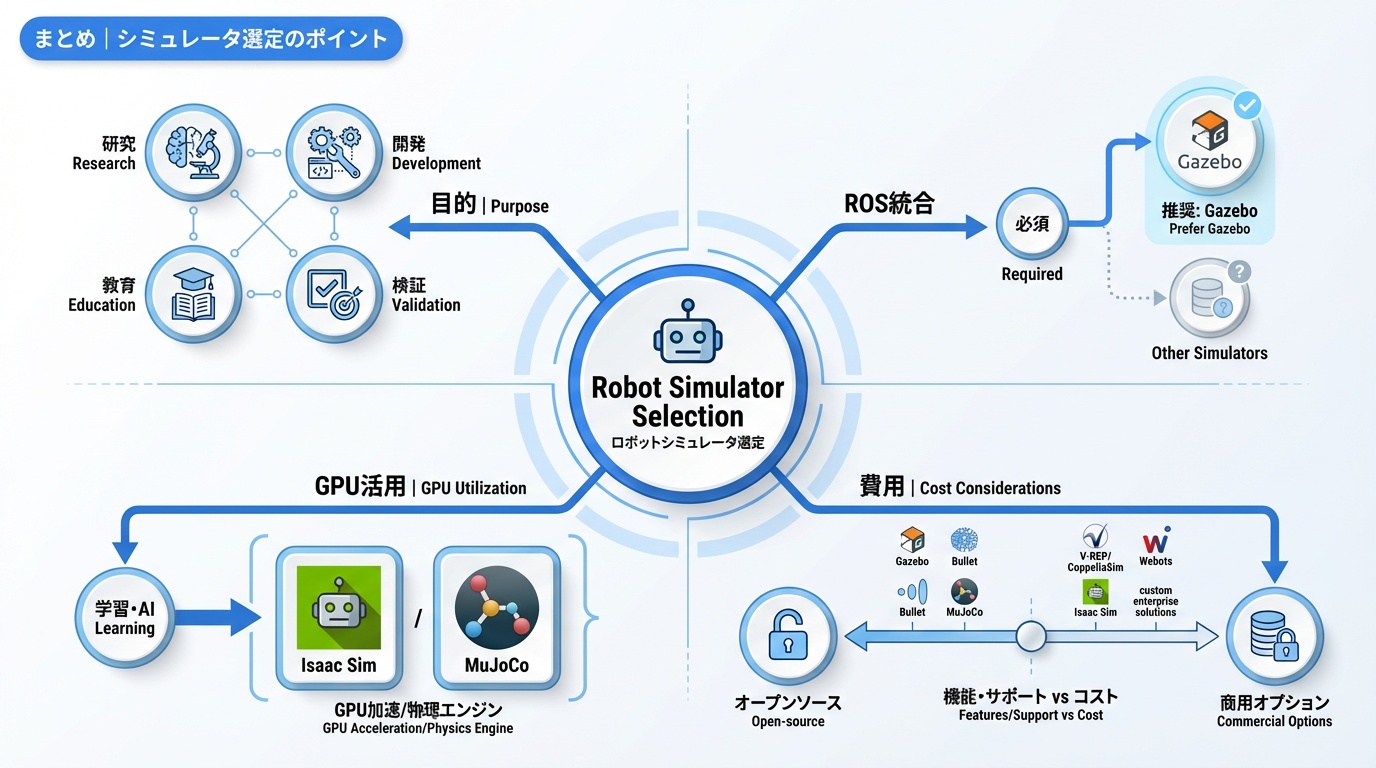
ロボットシミュレータは用途に応じた適切な選定が重要です。
選定チェックリスト
- 目的:研究/開発/教育/製品検証
- ROS連携:必要ならGazebo優先
- GPU活用:強化学習ならIsaac Sim/MuJoCo
- Sim-to-Real:Isaac Simが最有力
- コスト:オープンソースか商用か
- 学習コスト:チームのスキルセット
今後の展望
- 微分可能物理の普及
- 生成AIとの融合
- クラウドシミュレーションの拡大
- Reality Gapのさらなる縮小
関連記事としてEmbodied AIの動向もご覧ください。
https://ainow.jp/robot-reinforcement-learning/
https://ainow.jp/ros-guide/

